

Deep Fusion of Polystatic MIMO Radars with The Internet of Vehicles for Interference-free Environmental Perception
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
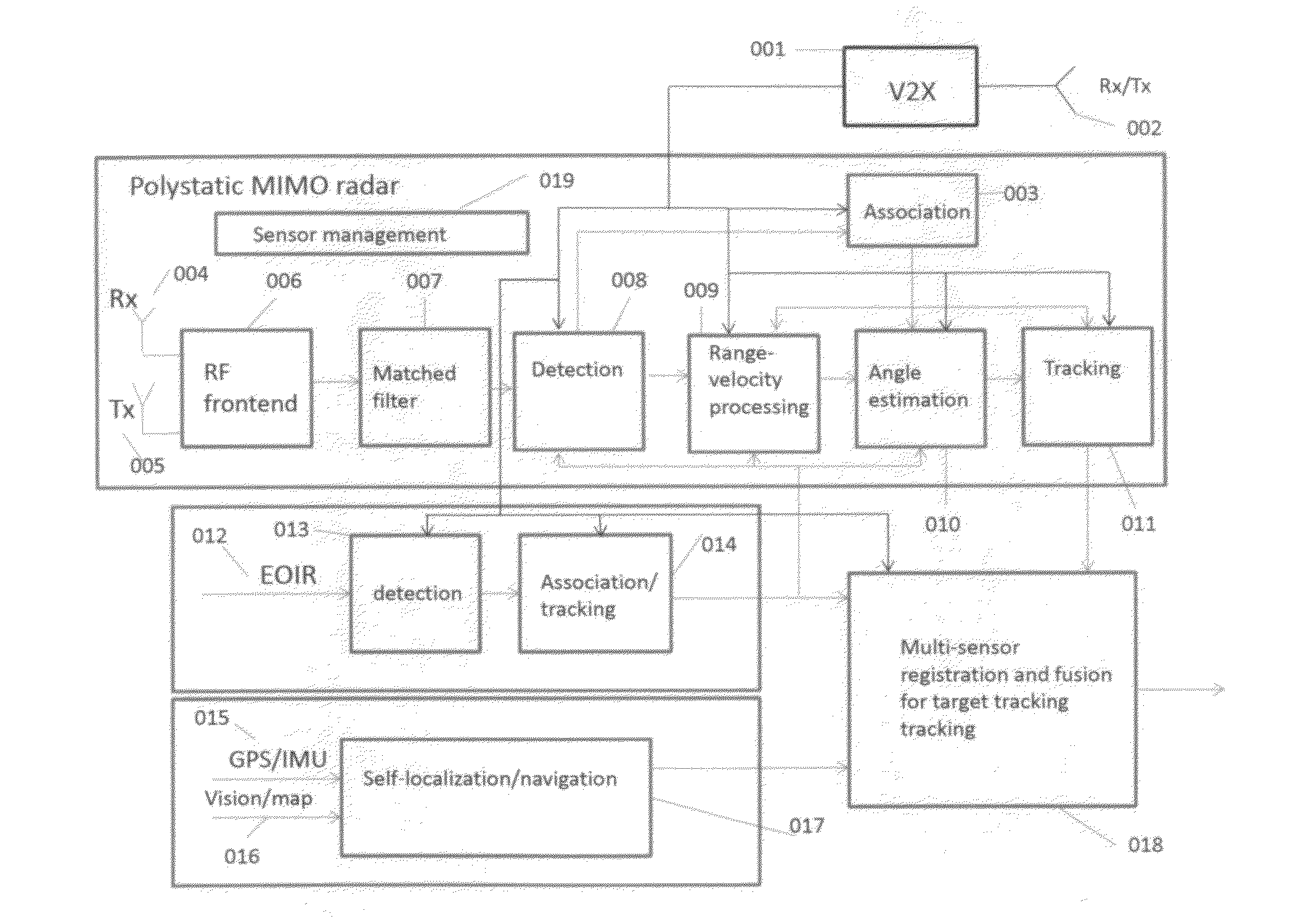
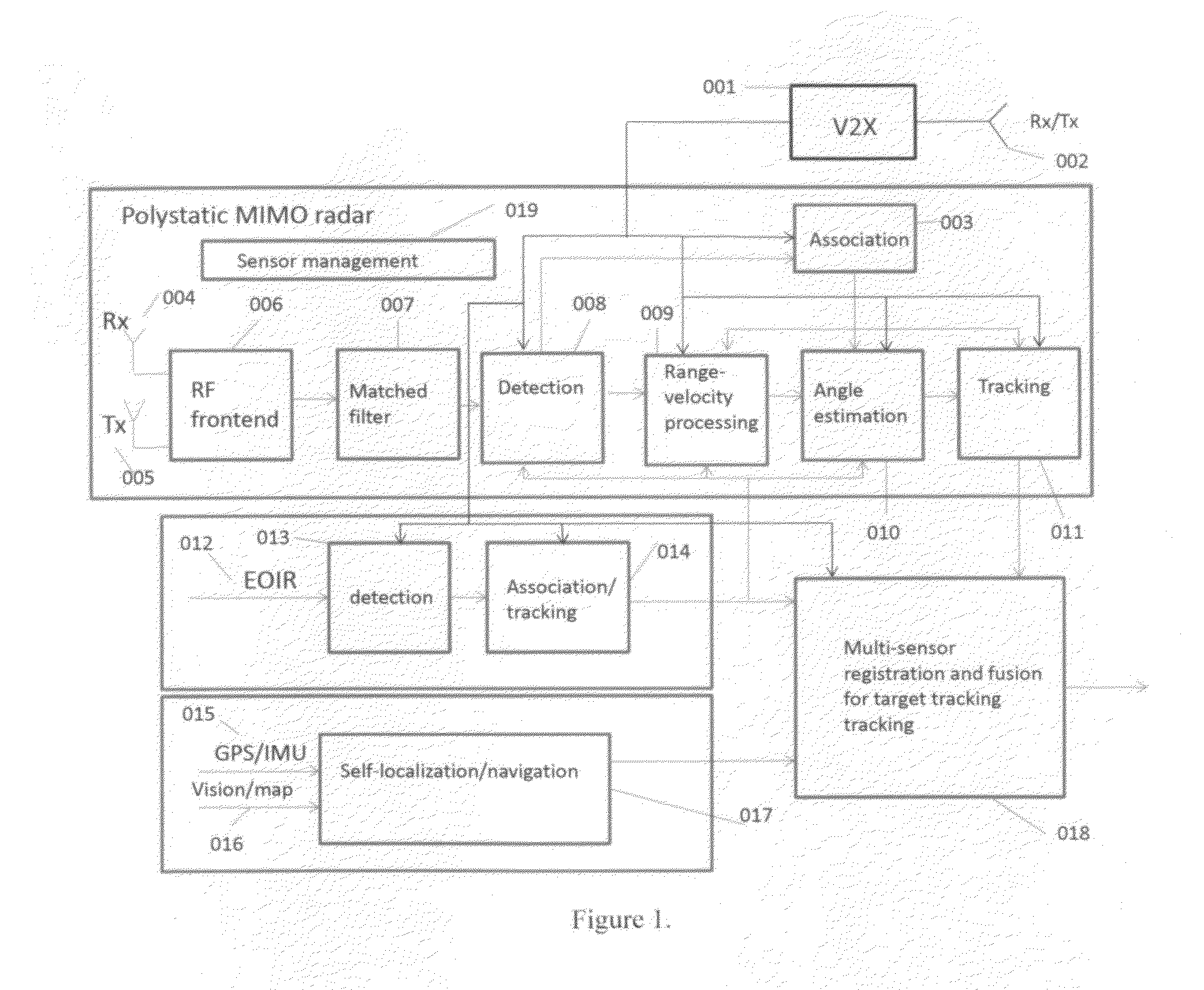
[0026]FIG. 1 shows the block diagram of the deep fusion system of polystatic MIMO radars with the internet of vehicles for inter-radar interference-free environmental perception. The deep fusion system on each vehicle mainly consists of: (1) polystatic MIMO radar: Receiver antenna 004, transmitter antenna 005, RF / LIDAR frontend 006, data association 003, matched filter 007, detection 008, range-doppler processing 009, angle estimation 010, tracking 011. For different radar types, the polystatic MIMO radar may have different sub-modules; (2) Passive EOIR subsystem: EOIR sensor 012, detection 013, tracking 014; (3) Self-localization / navigation subsystem: GPS / IMU 015, vision / map 016, self-localization / navigation algorithm 017; (4) Internet of Vehicles: V2X (V2V and V2I) 001, transmitter / receiver antenna 002; (5) multi-sensor registration and fusion module 018; (6) Sensor management module 019 which manages the sensor resources including time / frequency / code resources, power control, etc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More