

Parallel four-degree-of-freedom leg mechanism of walking robot
A walking robot, leg mechanism technology, applied in motor vehicles, transportation and packaging, etc., can solve the problems of insufficient torque of rotating direct driving force, poor stiffness of series joints, poor dynamic performance, etc., and achieve strong environmental adaptability and stiffness. Enhanced, stable and reliable results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
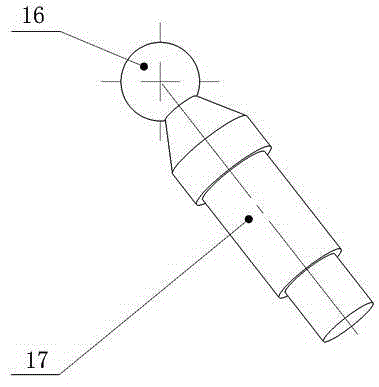
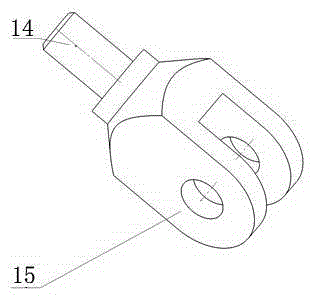
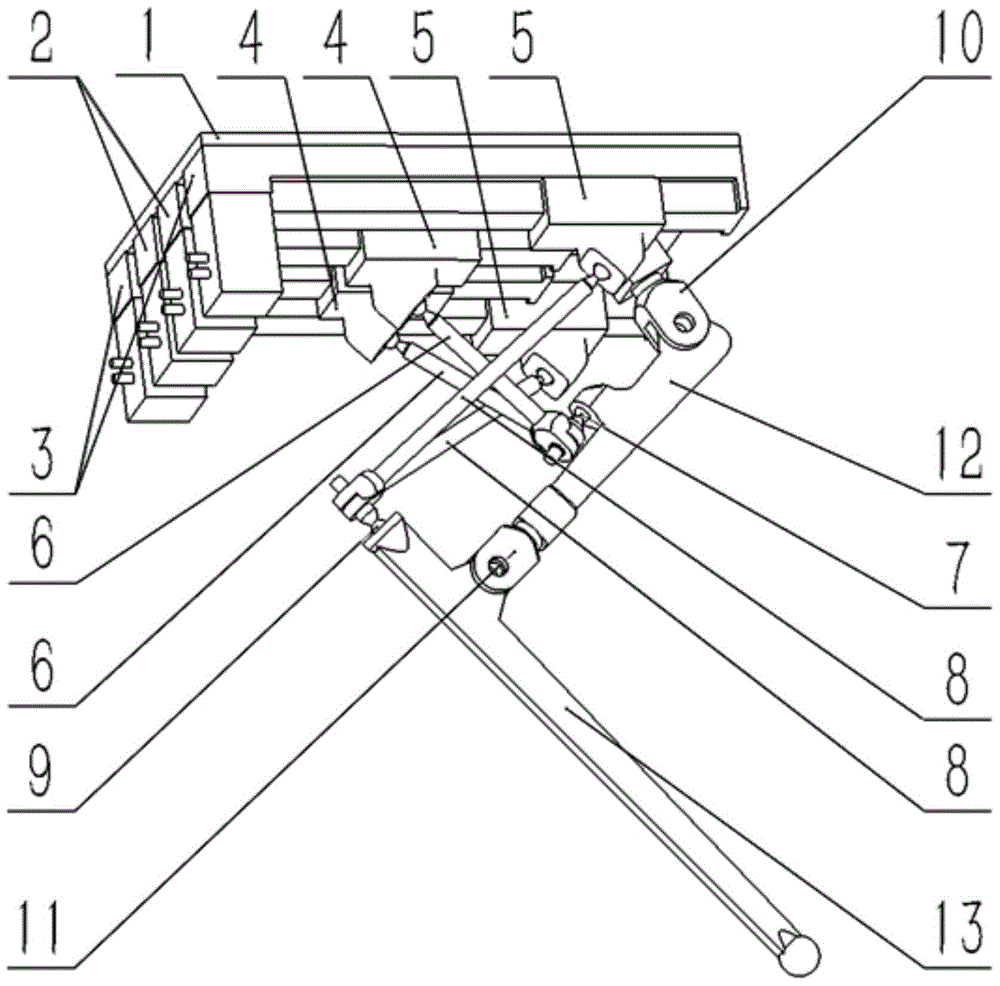
[0016] Such as Figure 1-3 as shown, figure 1 It is a schematic structural diagram of a parallel four-degree-of-freedom leg mechanism of a walking robot proposed by the present invention; figure 2 It is a structural schematic diagram of the first ball joint shaft or the second ball joint shaft in the parallel four-degree-of-freedom leg mechanism of a walking robot proposed by the present invention; image 3 It is a schematic structural diagram of a hip joint Hooke hinge or a knee joint Hooke hinge in a parallel four-degree-of-freedom leg mechanism of a walking robot proposed by the present invention.
[0017] refer to Figure 1-3 , a parallel four-degree-of-freedom leg mechanism of a walking robot, comprising a frame 1, a thigh bar 12, a calf bar 13, a thigh rotating mechanism and a calf rotating mechanism; the frame 1 is connected with the walking robot, the thigh bar 12, the calf bar 13 Set up below the frame 1 sequentially from top to bottom, one end of the thigh rod 12...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More