

Multistage robot lifting device and lifting method
A lifting device and robot technology, applied in the field of robotics, can solve problems such as difficulty in ensuring the stability of the lifting mechanism, insufficient stability of the robot lifting, and reduced energy consumption of mobile robots, and achieve uniform mass distribution of the fuselage, convenient drive control, and compact structure. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
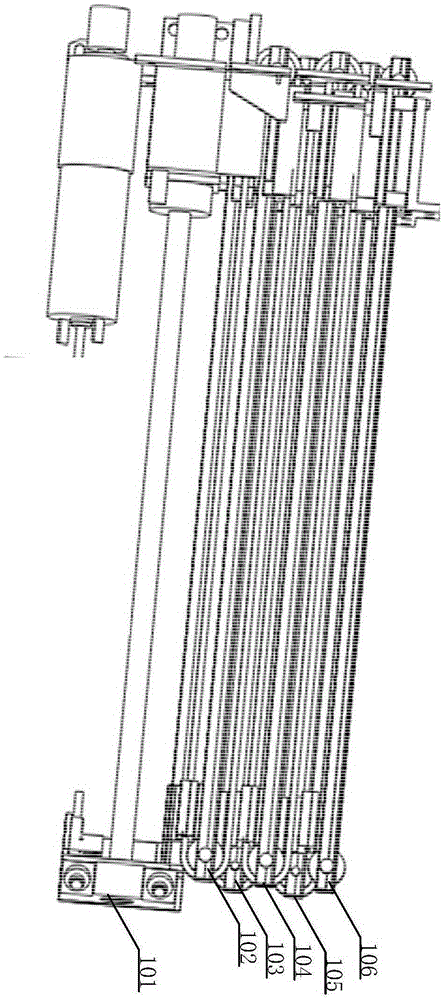
[0026] figure 1 Shown is a five-level robot lifting device, including a drive module 101 , a first-level lifting module 102 , a second-level lifting module 103 , a third-level lifting module 104 , a fourth-level lifting module 105 , and a fifth-level lifting module 106 .
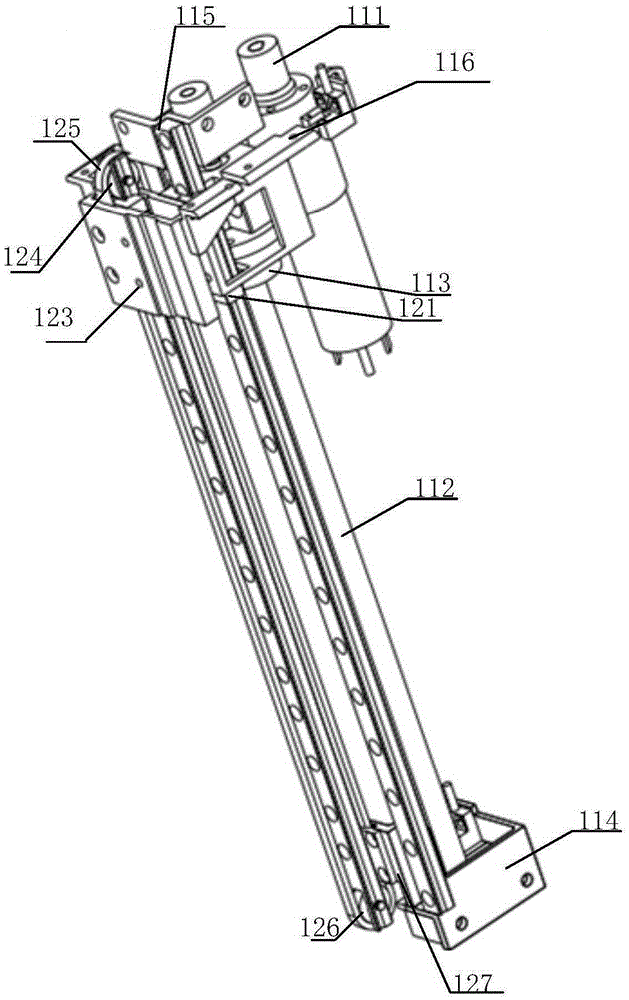
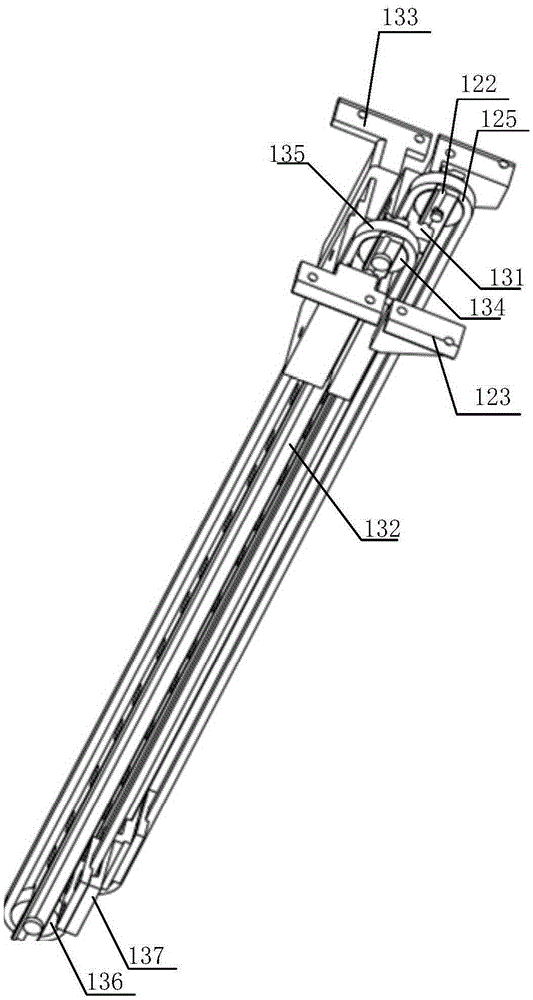
[0027] Combine below figure 2 , 3 , 4, explain in detail the structure and combination mechanism of the drive module 101 and the lifting modules at all levels.
[0028] Such as figure 2 as shown, figure 2What is shown is the structural relationship between the driving module 101 and the first-level lifting module 102 . The driving module 101 includes a driving motor 111 , a screw rod 112 , a nut driving body 113 , a base 114 , a main rail 115 and a top seat 116 . The two ends of screw mandrel 112, main rail 115 are all installed on base 114, top seat 116 respectively, and screw mandrel 112 is parallel with main rail 115, and leading screw 112 is rotatable on top seat 116 and base 114. The drive moto...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More