A monocular vision measurement method for measuring the position, attitude and rotation angle of objects with concentric circular targets
A technology of monocular vision and measurement method, applied in the direction of photo interpretation, etc., can solve the problems of large positioning error and great influence of slope in finding the position of the center image point of concentric circles, so as to achieve feasible measurement scheme, correct solution method and calculation method. simple effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
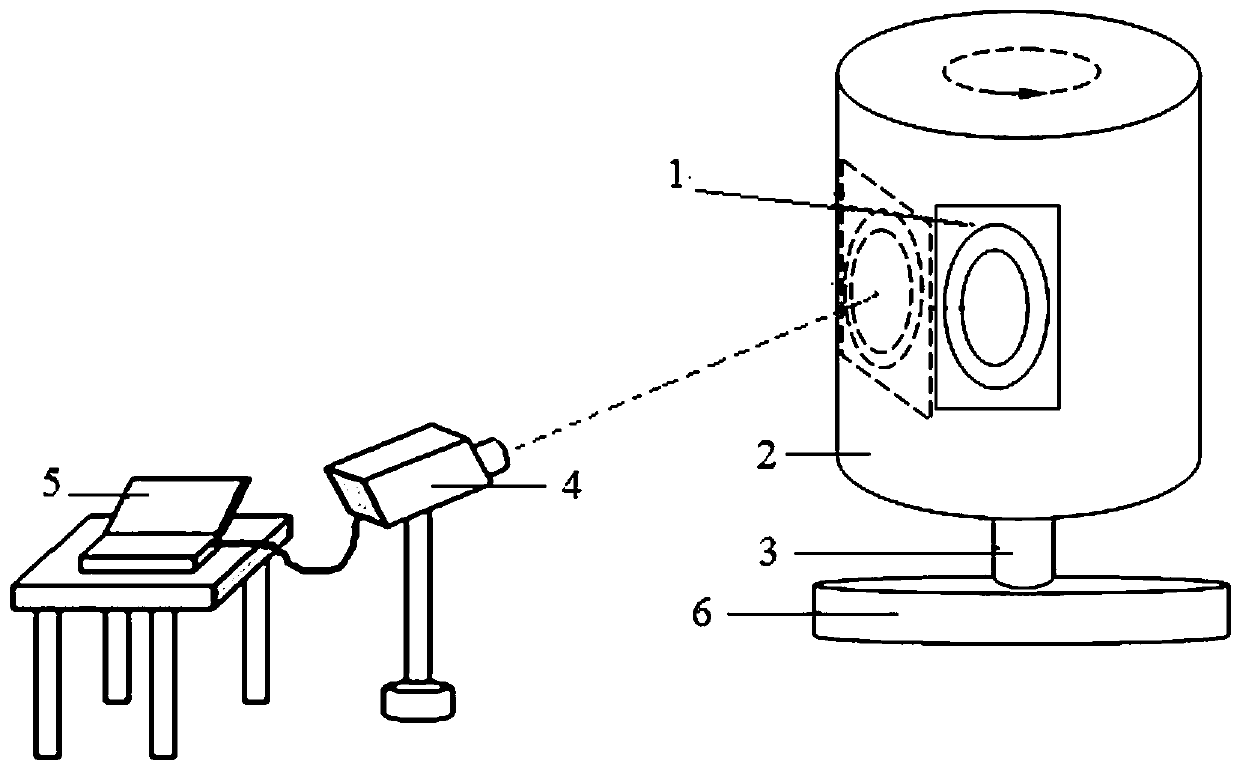
[0044] 1. Make a concentric circle target (1) by using concentric circles as marks on the target surface, and fix it on the object (2) parallel to the rotation axis (3) of the object to be measured (2). The rotating shaft (3) is installed on a base (6). Take pictures of the concentric circle target surface (1) with a digital camera (4) whose position and attitude remain unchanged. The image data of the digital camera (4) is transmitted to the computer (5) through the USB interface for processing.
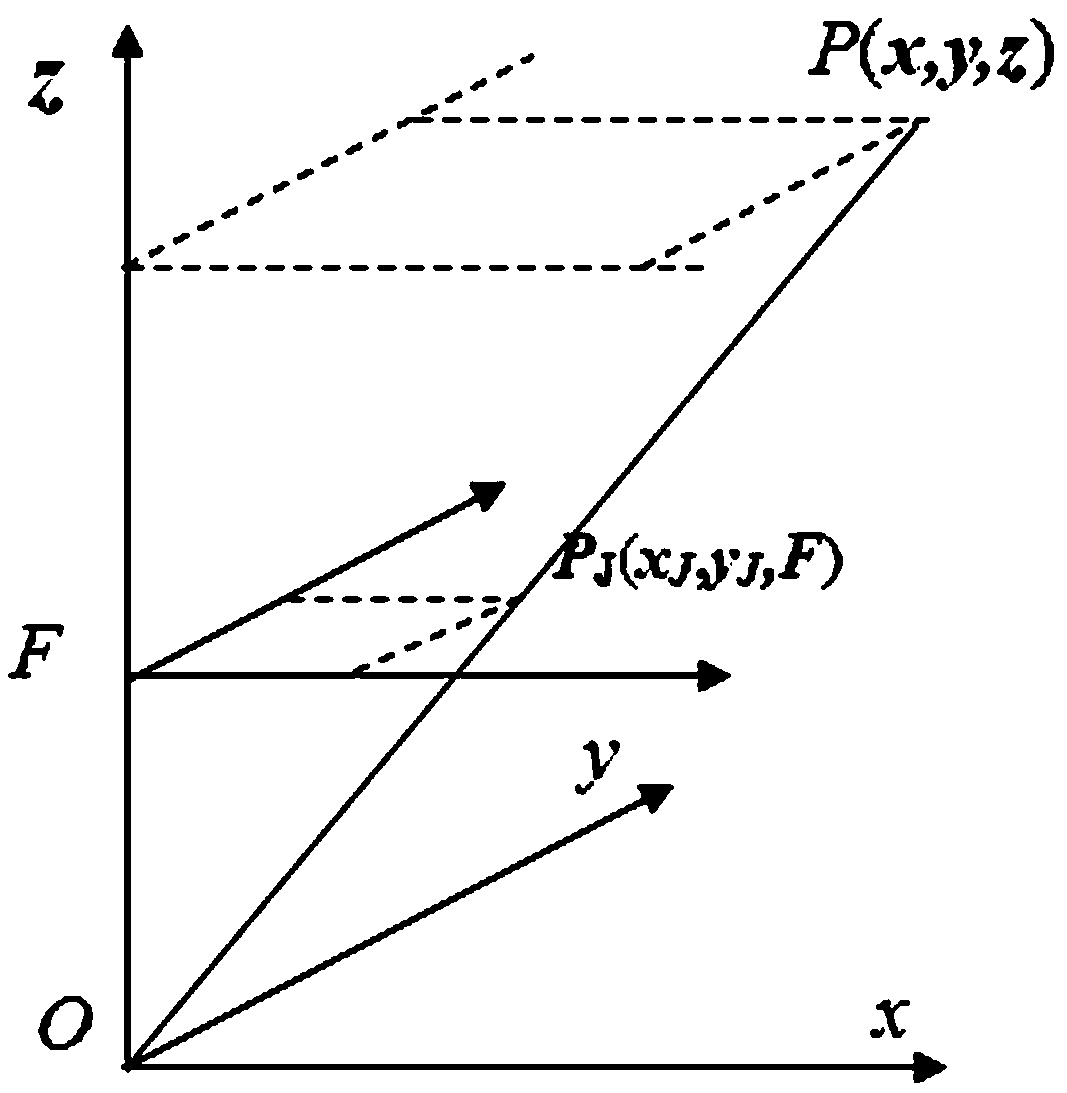
[0045] 2. Use the sub-pixel precision image processing method we designed to process elliptical images to process photos of concentric circles, and use least squares fitting to find the equations of the two ellipses on the image plane:
[0046] Equation of the small ellipse: X 2 +b 1 XY+c 1 Y 2 +d 1 X+e 1 Y+f 1 =0 (2-1)
[0047] Equation of the Great Ellipse: X 2 +b 2 XY+c 2 Y 2 +d 2 X+e 2 Y+f 2 =0 (2-2)
[0048] The number of directions (A, B, C) of the normal vect...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More