

Controllable mechanism type industrial robot manipulator
An industrial robot and operator technology, applied in the field of machinery, can solve problems such as high cost of hydraulic components, high maintenance cost, and insufficient response, and achieve the effect of large working space, low cost, and easy remote control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
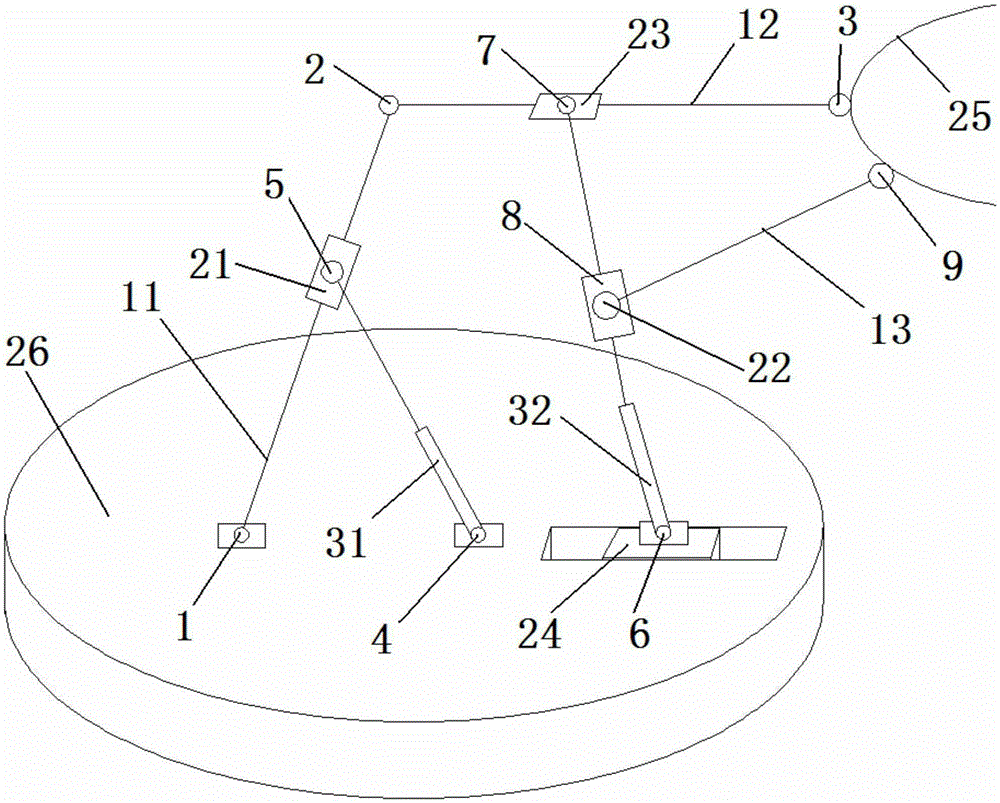
[0017] Controllable mechanism industrial robot manipulator, including rod one 11, rod two 12, rod three 13, telescopic rod one 31, telescopic rod two 32, sliding sleeve one 21, sliding sleeve two 22, sliding sleeve three 23, slider 24 , actuator 25 and working platform 26,
[0018] Rod 11, rod 2 12, rod 3 13, telescopic rod 1 31, telescopic rod 2 32, sliding sleeve 1 21, sliding sleeve 2 22, sliding sleeve 3 23, slider 24, actuator 25 and working platform 26,
[0019] The lower end of the rod one 11 is connected to the working platform 26 through the rotating pair one 1, the upper end of the rod one 11 is connected to one end of the rod two 12 through the rotating pair two 2, and the other end of the rod two 12 is connected to the actuator 25,
[0020] The lower end of the telescopic rod one 3111 is connected to the working platform 26 through the rotating pair 44, and the upper end of the telescopic rod one 3111 is connected to the sliding sleeve one 21 through the rotating p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More