Finger movement detection device based on Hall effect
A technology of motion detection and Hall effect, which is applied in the field of exoskeleton data gloves, can solve the problems that the flexibility of the robot cannot be satisfied, and the human-computer interaction interface cannot express the robot's control awareness in a timely, efficient and reliable manner.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
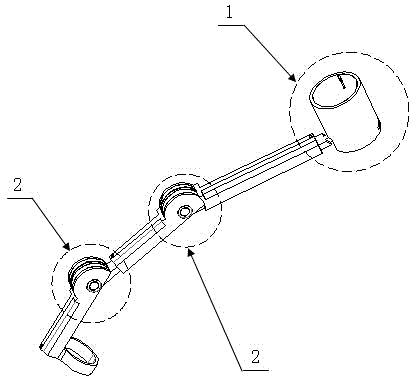
[0010] The joint name and main parts of the present invention:
[0011] 1. Metacarpophalangeal joints 2. Interphalangeal joints
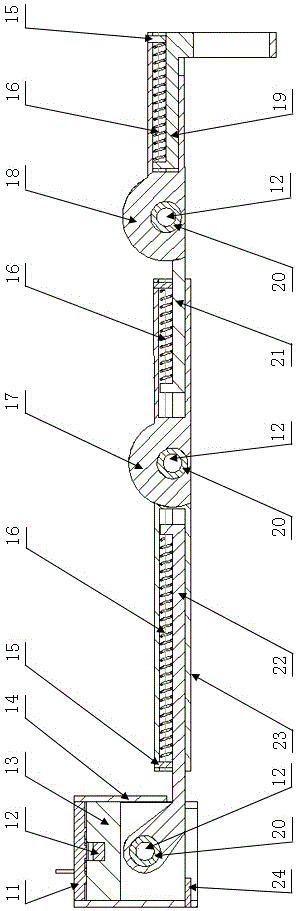
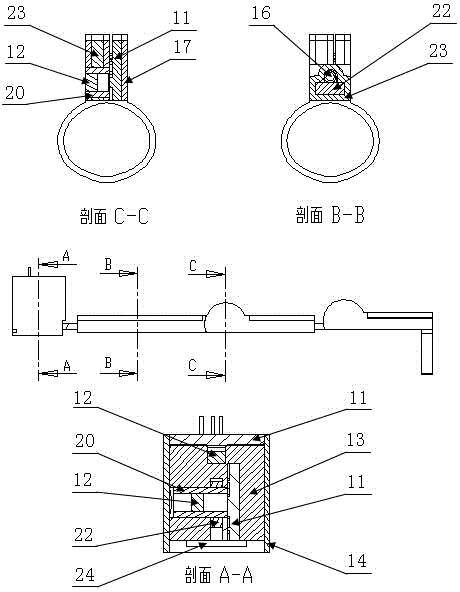
[0012] 11. Hall circuit 12. Magnet 13. Joint rotary body 14. Metacarpophalangeal joint shell 15. Positioning pin 16. Reset device 17. Outside the middle phalanx 18. Outside the distal phalanx 19. Inside the distal phalanx 20. Hollow shaft 21. Inside the middle phalanx 22. Inside the proximal phalanx 23. Outside the proximal phalanx 24. Positioning card
[0013] The said exoskeleton finger motion detection device consists of a Hall circuit 11, a magnet 12, an intra-articular rotator 13, a metacarpophalangeal joint shell 14, a positioning pin 15, a reset device 16, a middle phalanx 17, and a distal phalanx 18. The distal phalanx 19, the hollow shaft 20, the middle phalanx 21, the proximal phalanx 22, the proximal phalanx 23 and the positioning card 24 are composed. The principle of detecting the bending angle information of the fingers of the metacarpophal...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More