

Underwater gliding snakelike robot
A technology of snake-like robots and steering gears, which is applied in manipulators, program-controlled manipulators, manufacturing tools, etc. It can solve problems such as unsuitable for long-distance underwater diving, and achieve the effects of simple structure, low power consumption, and convenient installation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be described in further detail below in conjunction with the accompanying drawings.
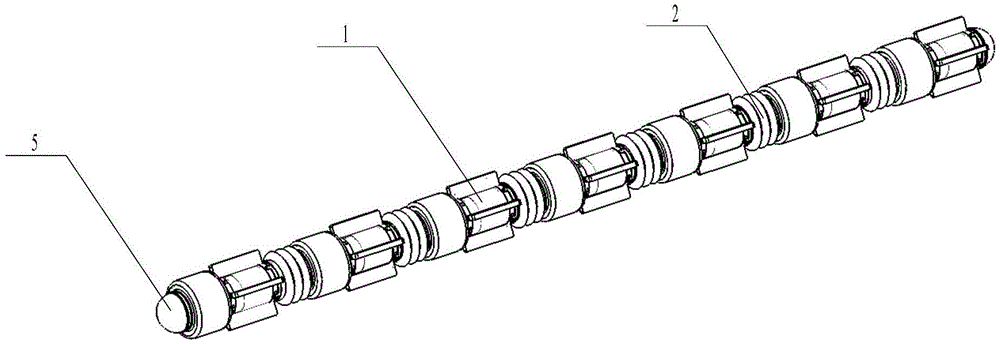
[0027] like figure 1 , figure 2 As shown, the underwater gliding snake-shaped robot of the present invention includes a plurality of modules 1 that are identical in shape and structure and are sequentially connected. A retractable waterproof sheath 2 is provided between adjacent modules 1, and the two ends of the underwater gliding snake-shaped robot Outer covers 5 are respectively installed on the modules 1, and the outer covers 5 are transparent hemispherical plastic covers. Each module 1 includes a self-expanding part and a rotating drive part which are sealed and connected to each other.
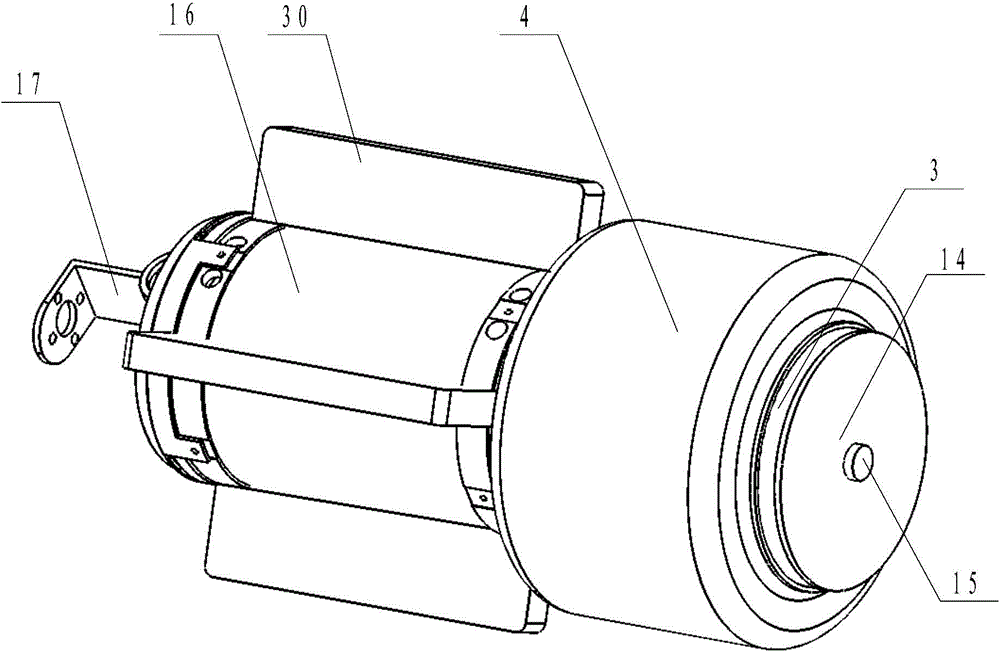
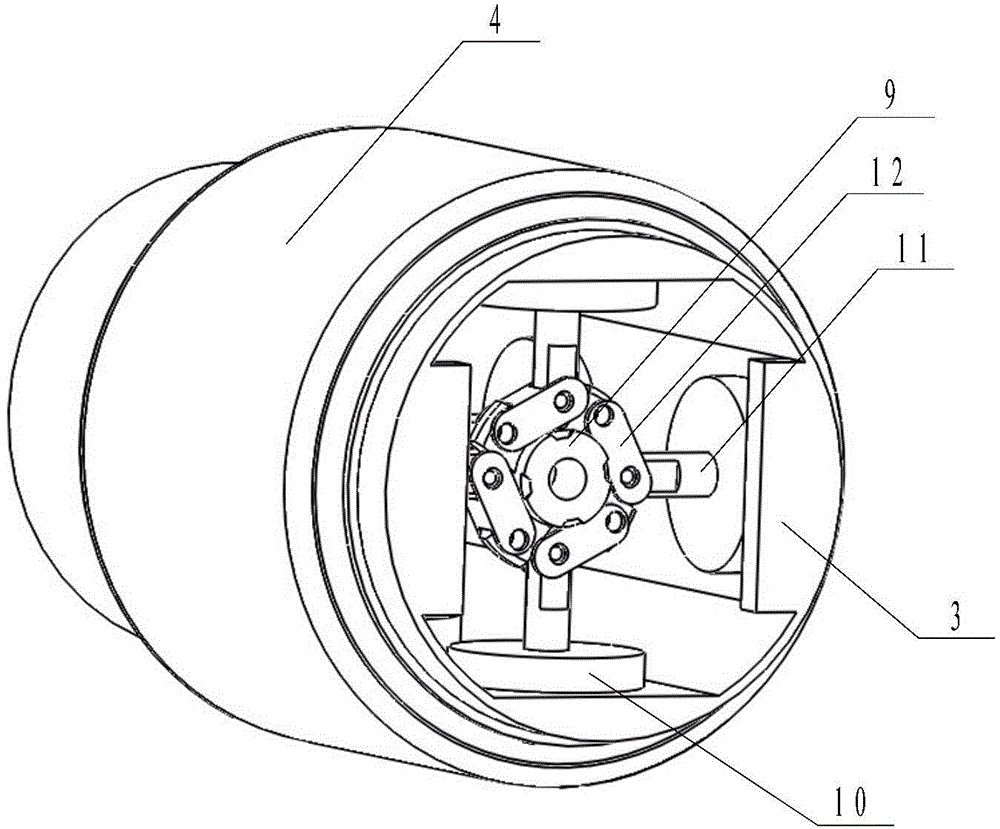
[0028] like Figure 3-6 As shown, the self-expanding part includes an expansion shell 3, an elastic rubber sleeve 4, an expansion steering gear 6, an expansion support 7, an output shaft 8 of the steering gear, a connecting rod telescopic mechanism and a housing end...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More