

Sitting mode control method for wearable bionic exoskeleton mechanical leg rehabilitation device
A rehabilitation device and mode control technology, used in passive exercise equipment, medical science, diagnosis, etc., can solve problems such as inconvenience of movement, and achieve the effect of improving adaptability, enhancing joint mobility and muscle strength
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] In order to better understand the present invention, the present invention will be further described below in conjunction with the accompanying drawings, but the embodiments are not intended to limit the protection scope of the present invention.
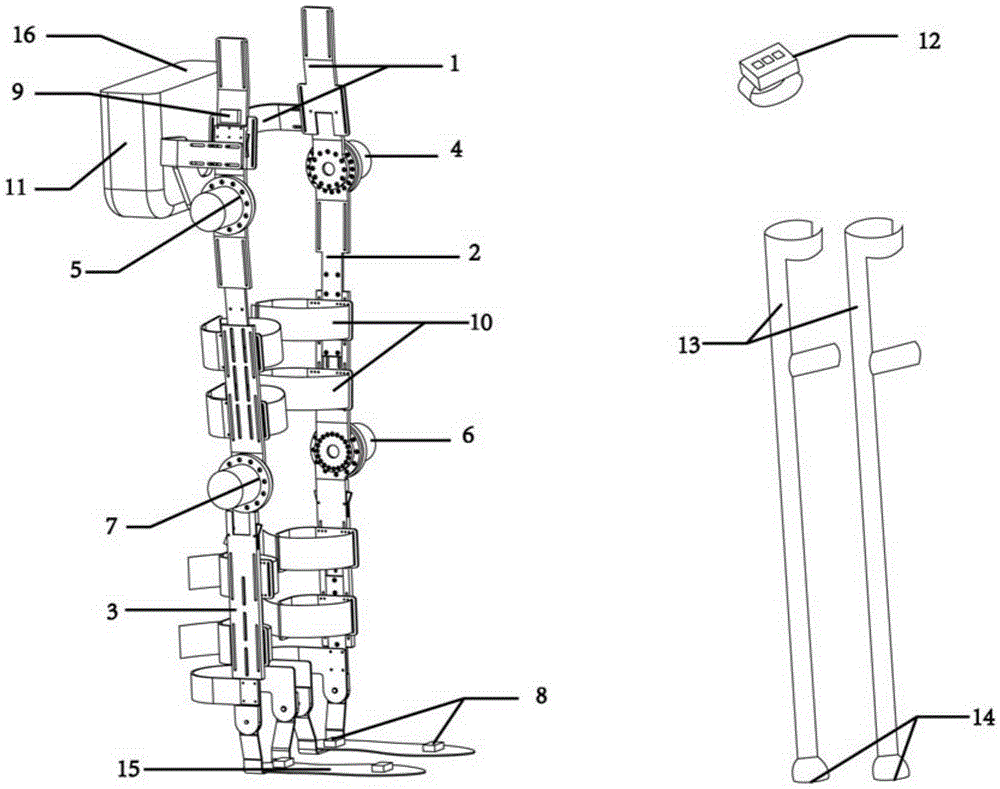
[0029] figure 1 It is a schematic diagram of the overall mechanical structure of the wearable bionic exoskeleton mechanical leg rehabilitation device. Such as figure 1 As shown, the exoskeleton mechanical leg rehabilitation device mainly includes a trunk support 1, a thigh support 2, a calf support 3, a hip motor 4, a hip motor angle sensor 5, a knee motor 6, a knee motor angle sensor 7, and a foot pressure sensor 8. Trunk inclination sensor 9, strap 10, control module 11, wrist watch 12, crutches 13, ground contact pressure sensor 14, foot support plate 15, voice prompt module 16; wherein, the hip motor 4 includes the hip of the left leg Motor 4_1 and right leg hip motor 4_2; Hip motor angle sensor 5 comprises left leg hip...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More