

Data glove for teaching programming of robot dexterous hand
A data glove, dexterous hand technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of complex principle, high cost, complex structure, etc., to improve programming efficiency, reduce difficulty, and reduce cost and complexity. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
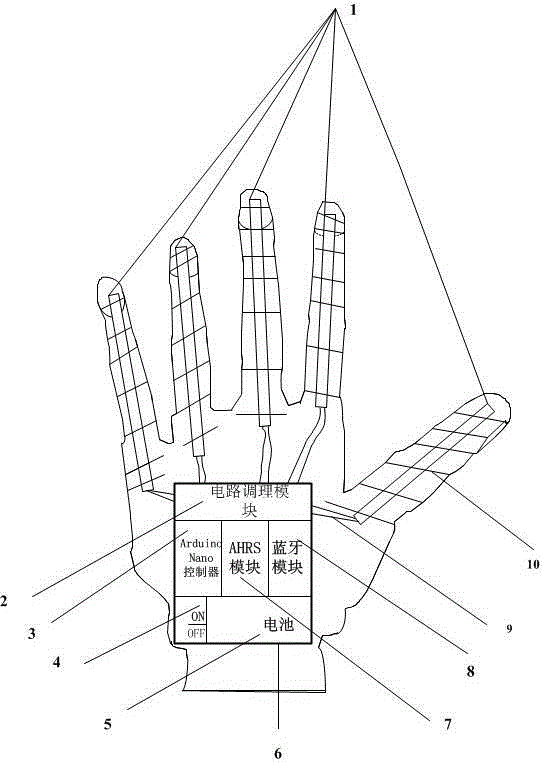
[0021] Such as figure 1 Shown is the schematic diagram of the appearance of the present invention, 1 is the Flex4.5-inch bending sensor, 6 is the integrated PCB board, the integrated PCB board includes a small module 2, ArduinoNano controller 3, teaching programming switch 4, battery 5, AHRS nine-axis Attitude sensor 7, bluetooth module 8, bending sensor wire 9, bending sensor fixing wire 10. Five bending sensors are respectively arranged on the backs of the five fingers. The bending sensors can detect the bending changes of the fingers. The greater the bending, the greater the resistance value. The resistance range of the resistance is roughly 9000 ohms to 22000 ohms.
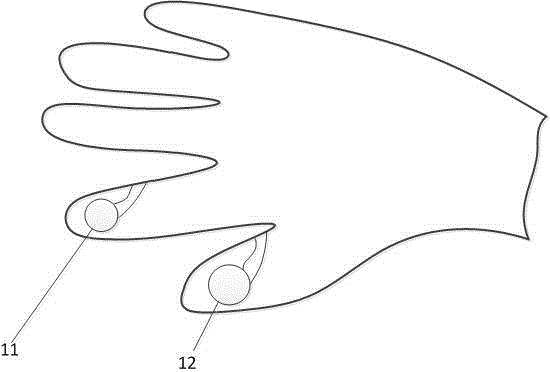
[0022] Such as figure 2 Shown is the distribution diagram of the FlexiForce membrane pressure sensor. The membrane pressure sensor 11 and the membrane pressure sensor 12 are respectively fixed on the inside of the thumb and index finger. The greater the pressure on the membrane pressure sensor, the smaller t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More