

Air flotation supporting device for space manipulator
A space manipulator and support device technology, applied in manipulators, manufacturing tools, etc., can solve the problems of inability to realize connection and disassembly, reduced safety, large friction, etc., to improve stability and adaptability, good connection and stability. The effect of disassembly and design method is simple
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
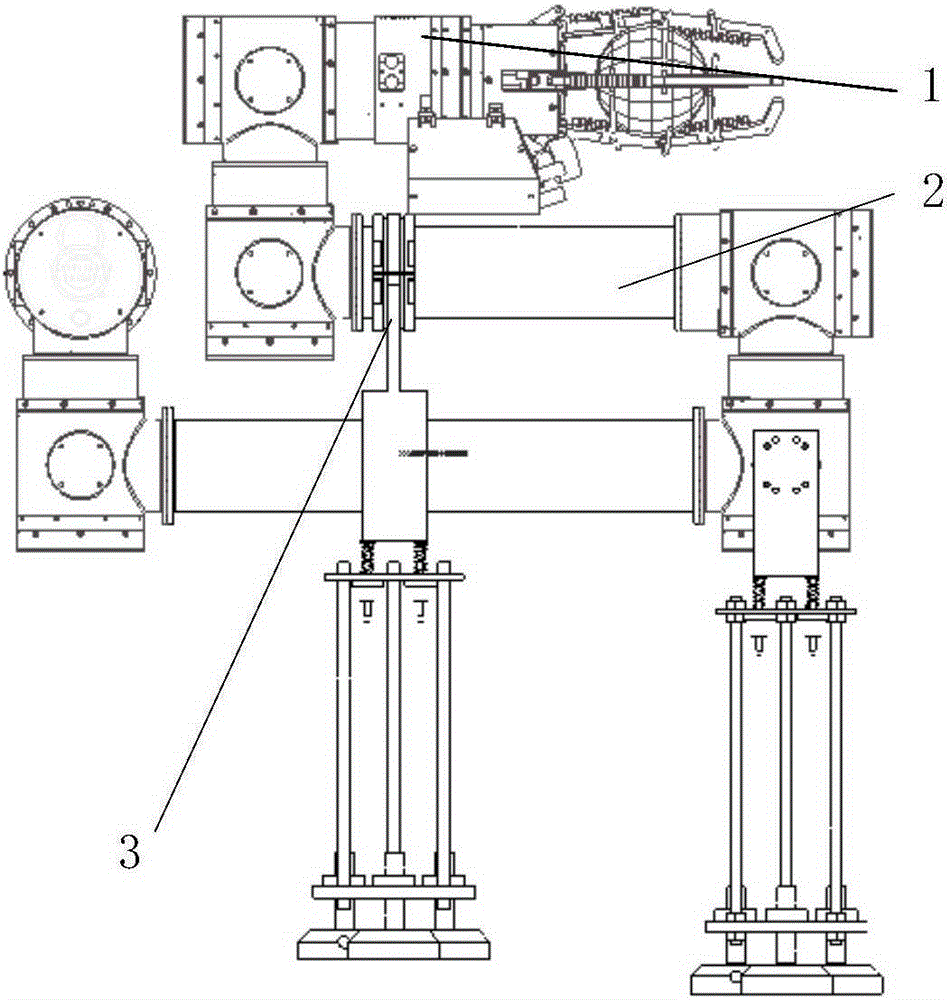
[0028] Such as figure 1 Shown is a schematic diagram of the application environment of the space manipulator air flotation support device of the present invention. It can be seen from the figure that the space manipulator air flotation support device is used to support the space manipulator to perform approximately frictionless movement in the simulation experiment of the ground microgravity environment. The specific installation method The circular ring 8 is placed for penetrating the arm 2 of the mechanical arm 1 in the outer space into the arm of the air bearing device 3 , thereby supporting the movement of the arm of the manipulator.
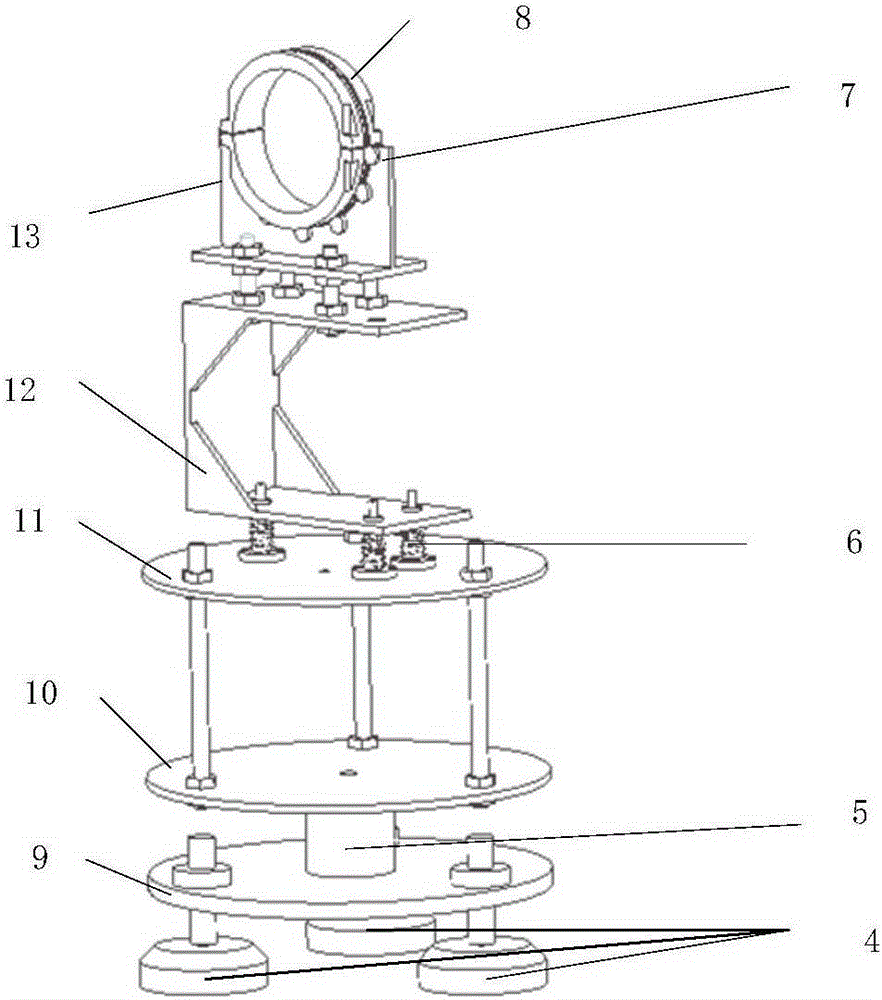
[0029] Such as figure 2 Shown is a schematic composition diagram of the space manipulator air bearing support device of the present invention. It can be seen from the figure that the space manipulator air be...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More