

Yacht track autopilot on the basis of active-disturbance-rejection control algorithm
A technology of active disturbance rejection control and autopilot, applied in the direction of non-electric variable control, control/adjustment system, two-dimensional position/channel control, etc., can solve the problem of not being able to directly apply twin-propeller fast yachts, increase labor intensity, and reduce rescue Speed and other issues, to achieve high reliability, reduce labor intensity, and strong anti-interference ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0009] The designed yacht track autopilot based on the active disturbance rejection control algorithm has three working modes, namely: automatic track mode, automatic heading mode and full manual mode. The specific implementation manners of the present invention will be described in detail below with reference to the accompanying drawings.
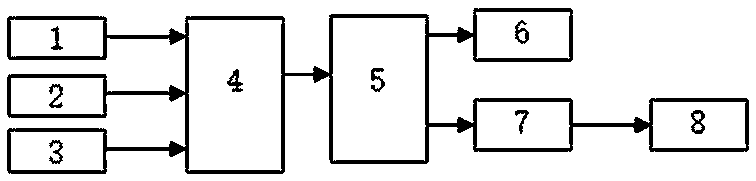
[0010] like figure 1 As shown, the microcontroller 5 is the core component of the yacht track autopilot, reads the yacht status information from the signal input interface 4, runs the ADRC control algorithm program, and outputs the calculation results. The man-machine operation interface 1 can set the working mode of the system and set the course and navigation route. The course input module 2 provides course angle information during navigation for the yacht track autopilot of the embodiment of the present invention, and the GPS positioning module 3 provides the actual course angle information of the yacht. Position, the signal input inte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More