

A plant row following method for a harvesting robot
A technology of robot and robot body, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as automatic following of plants that cannot be directly applied to harvesting robots, and achieve the effect of continuously tracking harvested plants
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0077] The above is the content of the technical solution of the present invention, and now the solution of the present invention is described in detail as follows:
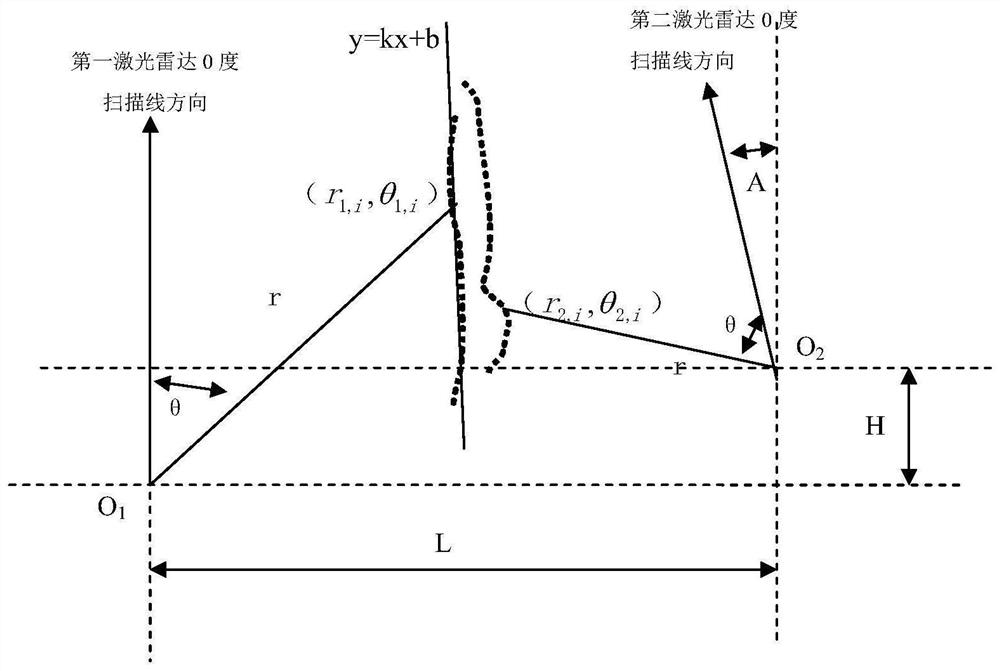
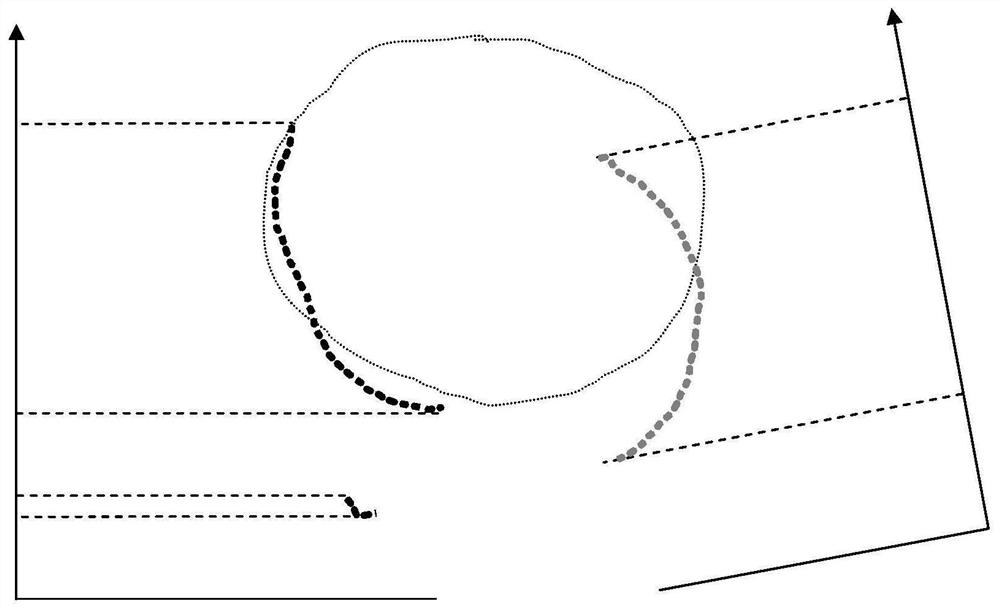
[0078] refer to Figure 1~Figure 4 , the embodiment discloses a plant row following method of a harvesting robot, including setting at least two laser radars on both sides of the front of the harvesting robot body, and more than two laser radars scan the same plant at the same time. The calibration method makes the laser The data information collected by radar scanning is more comprehensive and accurate than that of a single laser radar. In this embodiment, only two low-resolution laser radars are set on the two sides directly in front of the harvesting robot body. There is an RGB vision sensor at the end, which is realized through the following steps:
[0079] S1: The first laser radar and the second laser radar scan the calibration object at the same time and collect multiple laser data points respectively, an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More