

Full-automatic inspection robot chassis
An inspection robot, fully automatic technology, applied in the direction of instruments, motor vehicles, electric vehicles, etc., can solve problems such as falling and breaking equipment, difficulty in automatic charging of robots, and collision with cabinets
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
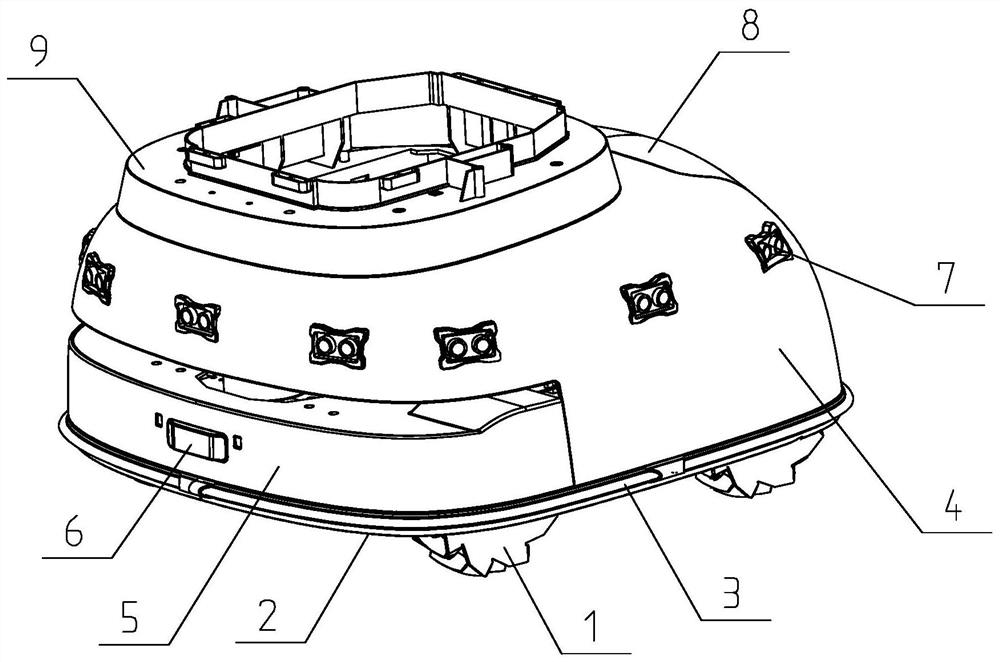
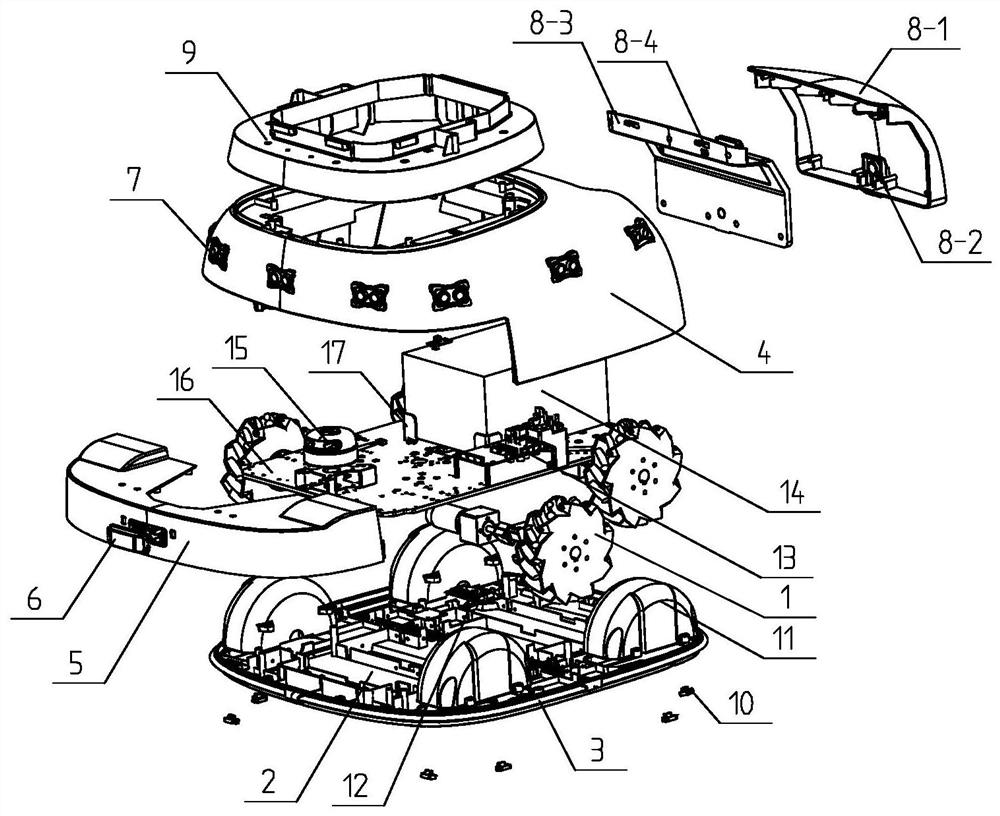
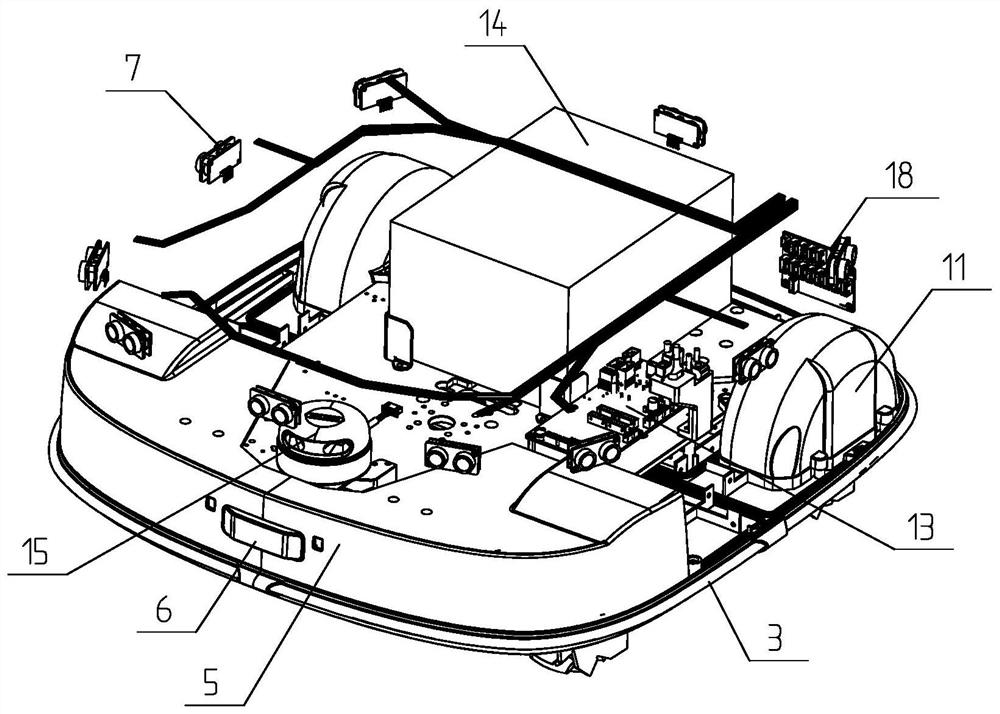
[0026] Refer to attached figure 1 to attach Figure 7 , a fully automatic inspection robot chassis, including drive wheel 1, chassis shield 2, anti-collision strip 3, chassis shell 4, front guard plate 5, infrared receiver 6, ultrasonic radar 7, battery back cover 8, upper installation Shell 9, drop trigger 10, road wheel shield 11, drop control board 12, drive board 13, power battery 14, laser radar 15, drive motor mounting board 16, battery positioning seat 17, anti-collision strip drive board 18, temperature Humidity sensor 19 and charging contact 20, the drive wheel 1 is fixed on the four corners of the drive motor mounting plate 16, the chassis shield 2 is fixed on the drive motor mounting plate 16 by fastening bolts, and the anti-collision strip is 3 weeks It is installed on the chassis shield 2 in the opposite direction, and is used for the perception of obstacles encountered by the robot. The road wheel shield 11 is fixed on the chassis shield 2 by bolt locking, and t...
Embodiment 2
[0028]The difference between this embodiment and Embodiment 1 is that the drive wheel 1 includes a drive motor 1-1, a reducer 1-2, a shaft coupling 1-3, a bearing mounting seat 1-4, and a connecting flange 1- 5. The mecanum wheel 1-6 and the drive wheel connecting shaft 1-7 are characterized in that: the drive motor 1-1 is connected to the reducer 1-2, and the reducer 1-2 adopts a tight The solid screw is fixed on the drive motor mounting plate 16, and the shaft coupling 1-3 is used to connect the output shaft of the reducer 1-2 and the drive wheel connection shaft 1-7, so as to transmit the motor motion to the mecanum wheel 1-6, The bearing mount 1-4 is arranged on one side of the shaft coupling 1-3 for supporting the driving wheel connecting shaft 1-7, and the connecting flange 1-5 is arranged on the driving wheel connecting shaft 1-7 and the Mecanum wheel Between 1-6, wherein the driving wheel connecting shaft 1-7 is fixed on the inner surface of the connecting flange 1-5 b...
Embodiment 3
[0030] The difference between this embodiment and Embodiment 2 is that the output shaft of the reducer 1-2 is provided with a reducer output shaft key head 1-2-1 and a reducer output shaft keyway 1-2-2, and the above-mentioned reducer The selection range of the width of the key head 1-2-1 of the output shaft of the reducer is 5-10mm, and the height of the key head 1-2-1 of the output shaft of the reducer is 5mm.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More