Self-propulsion type submarine topography and landform mapping system and method based on perception driving
A topographic and self-propelled technology, applied in surveying and navigation, surveying devices, cross-section depiction, etc., can solve the problem of low imaging resolution, complex working principle and equipment composition, and incomplete detection coverage area of multi-beam surveying and mapping. problem, to achieve the effects of strong drawing performance, improved positioning performance, and improved calculation speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be further described below in conjunction with accompanying drawing.
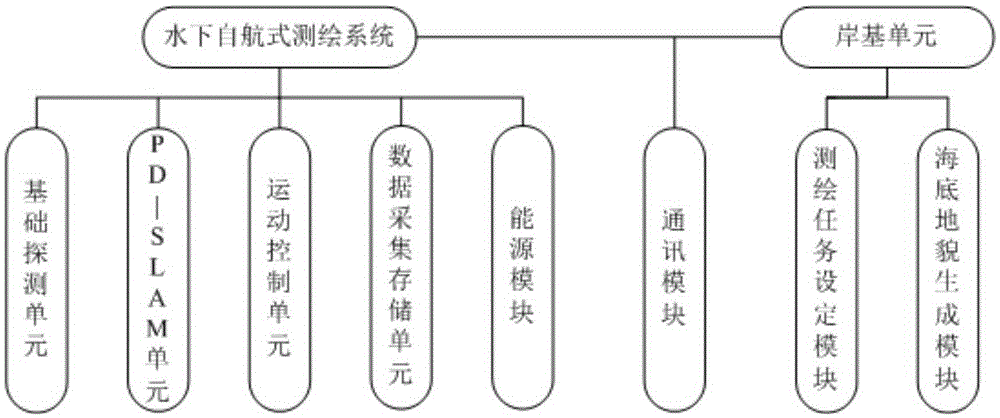
[0033] Such as figure 1 As shown, the system of the present invention includes an underwater self-propelled surveying and mapping system and a shore-based unit, and the two are connected by a communication module, wherein the underwater self-propelled surveying and mapping system includes a basic detection unit, a PD-SLAM unit, and a motion control unit. unit, data acquisition storage unit and energy module. The shore-based unit includes a surveying and mapping task setting module and a seabed topography generation module.
[0034] Among them, the PD-SLAM unit includes two parts: PDM module and SLAM module.
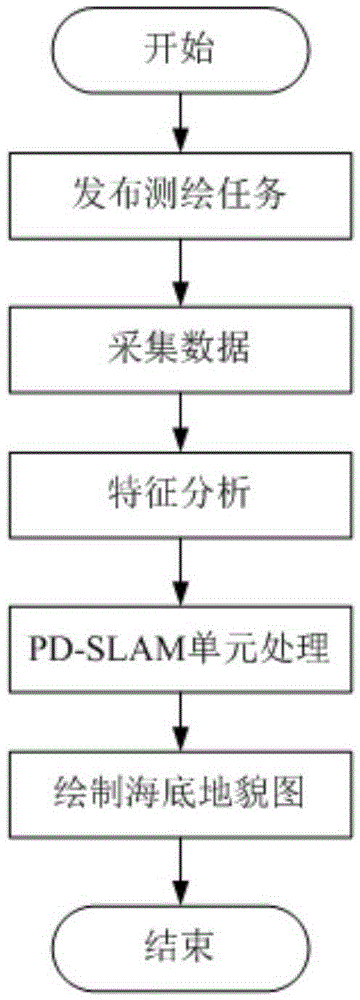
[0035] Such as figure 2 As shown, the system of the present invention specifically adopts the following methods to realize:
[0036] Step 1: The shore-based unit issues surveying and mapping tasks to the surveying and mapping system through the communication modul...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More