

Clamping performance control system and method for robot gripper
A technology of robot gripper and control system, applied in sequence/logic controller program control, electrical program control, etc., can solve the instability of the production line, limit the application flexibility of the robot gripper, and the clamping speed cannot be programmed online, etc. problem, to achieve a reasonable effect of the design
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
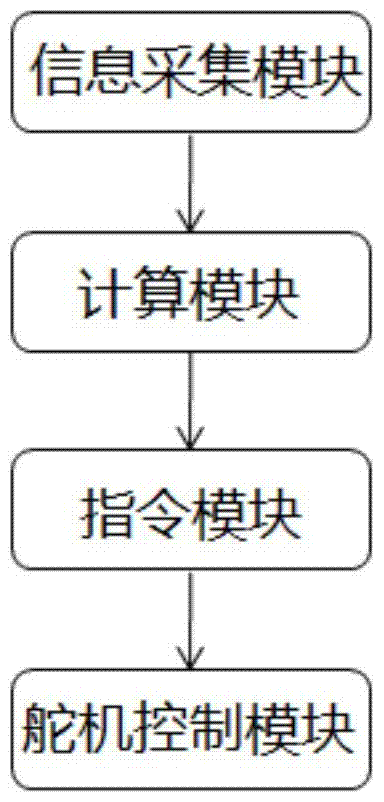
[0027] like figure 1 As shown, the present embodiment relates to a clamping performance control system for a robot gripper, including: an information collection module, a calculation module, an instruction module, and a steering gear control module, wherein: the information collection module collects the gripper of the robot gripper in real time The holding information is input into the calculation module for calculation; the calculation module converts the result obtained by the calculation into an instruction that the steering gear control module can recognize through the command module, and the steering gear control module regulates the gripping performance of the robot gripper according to the command.
[0028] The clamping performance includes clamping force and clamping speed.
[0029] The clamping information includes, but is not limited to: clamping opening, clamping speed, clamping force, steering gear temperature and current voltage.
[0030] The computing module an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More