

A collaborative control method for multi-industrial robots
An industrial robot and collaborative control technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of poor information exchange ability, poor scalability, and difficult collaborative control, so as to improve work efficiency and improve work efficiency. The effect of good scalability and simple method
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
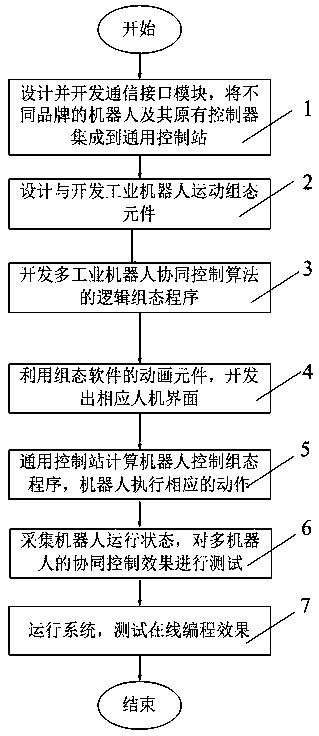
[0034] Please refer to figure 1 , the present invention provides a kind of cooperative control method of multi-industrial robot, it is characterized in that, comprises the following steps:
[0035] Step S1: Design and develop communication interface modules to integrate industrial robots of different brands and their original controllers into a general control station;
[0036] The communication interface module can realize the connection and communication between each industrial robot and its controller and the general control station by calling the API application programming interface of the original controller of the industrial robot in the Ethernet environment; specifically, the communication interface module A typical C / S architecture is adopted, in which the general control station is used as the client, and the industrial robot and its original c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More