

A large-size variable-diameter robotic fixture for processing pipe pile end plates
A robot fixture, large-scale technology, applied in the direction of manufacturing tools, cleaning methods and utensils, chucks, etc., can solve the problems of frequent fixture replacement and low automation, meet the needs of reliable clamping, improve the degree of work automation, stable and reliable clamping lasting effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0022] The present invention will be further elaborated below in combination with specific embodiments and accompanying drawings.
[0023] The clamping mechanism provided by the present invention is a large-size variable-diameter robotic clamping device for processing pipe pile end plates. The mechanism has a simple structure and can meet the needs of fast and reliable clamping of pipe pile end plates of various sizes and specifications. Referring now to the drawings, embodiments of the provided clamp mechanism will next be described.
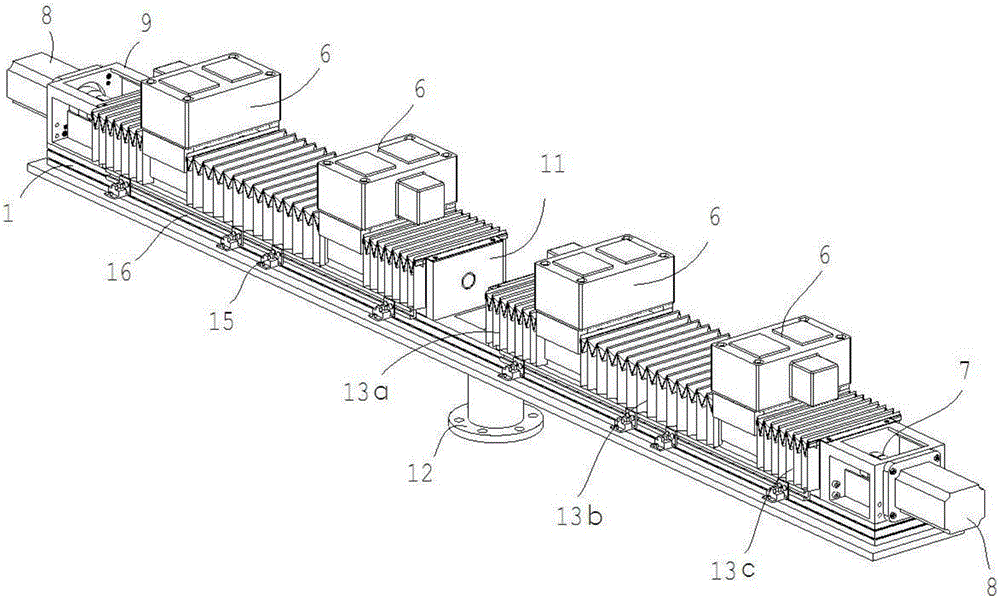
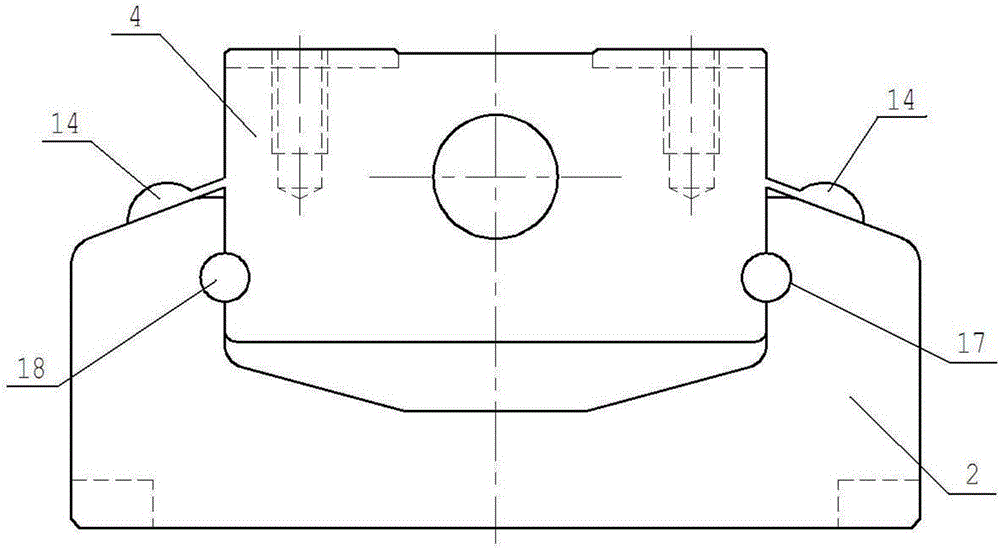
[0024] like figure 1 and figure 2 As shown, a large-size variable-diameter robot clamp for pipe pile end plate processing mainly includes a base, a linear displacement mechanism, a clamping mechanism, a positioning mechanism, and a dust-proof mechanism.
[0025] The base mainly includes a support frame 1 and a robot connecting flange 12. The cross section of the support frame 1 is a rectangular structure, and the four corners are fixed with ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More