Multi-joint robot track planning method under constraint of safety space
A multi-joint robot and safe space technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of not caring about the safe working space range, heavy teaching tasks, and low teaching efficiency, so as to improve teaching efficiency , avoid interference problems, reduce the number of effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be further described below in conjunction with the embodiments according to the accompanying drawings.
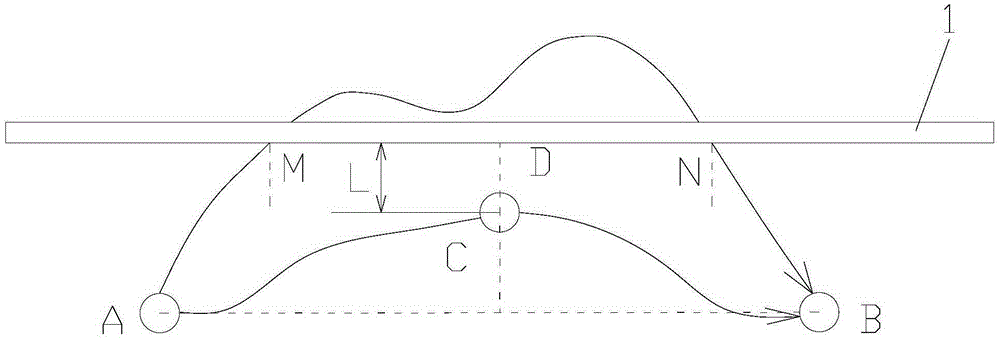
[0023] as attached image 3 The multi-joint robot trajectory planning method under the safety space constraint of the present invention comprises the following steps:
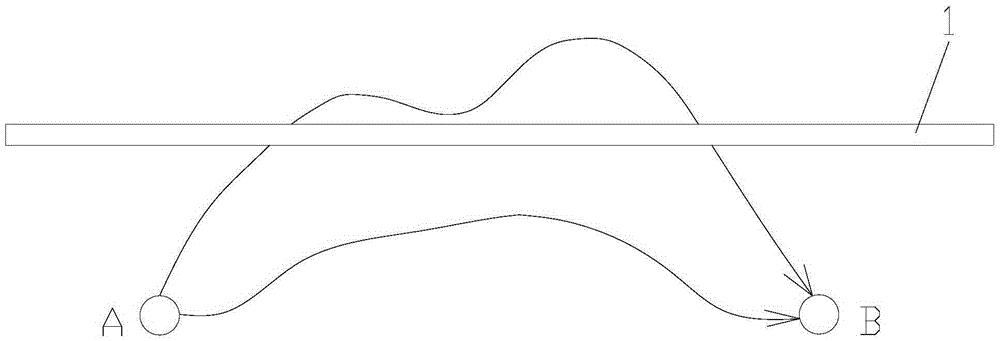
[0024] (1) Set up a safe space: the installation position of the robot and the layout of the surrounding equipment and environment have been determined, and the space in which the robot can work safely is determined by means of measurement or modeling, and then the safe working space range of the robot is set using the teaching pendant ;
[0025] (2) Manual teaching: According to the requirements of the robot's task, the teaching of the robot's trajectory is carried out;
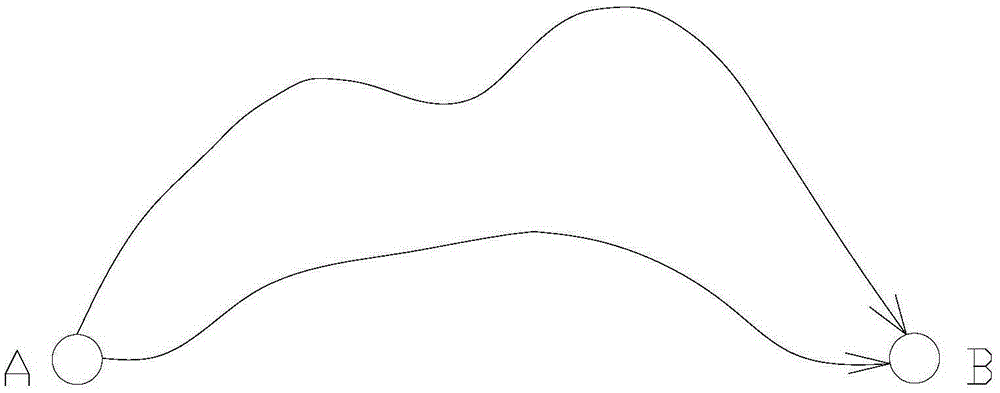
[0026] (3) Interference check: When the robot performs point-to-point motion, it plans the path between the two points according to the pose of the current point A, the pose of the target point B, and th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More