

Lane detection method based on adaptive region of interest
A technology of area of interest and lane detection, applied in the field of computer vision and intelligent vehicle assisted driving, can solve problems such as excessive noise, reduce data processing speed, and fix the area of interest in lanes, achieve accurate detection, ensure accuracy and real-time sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
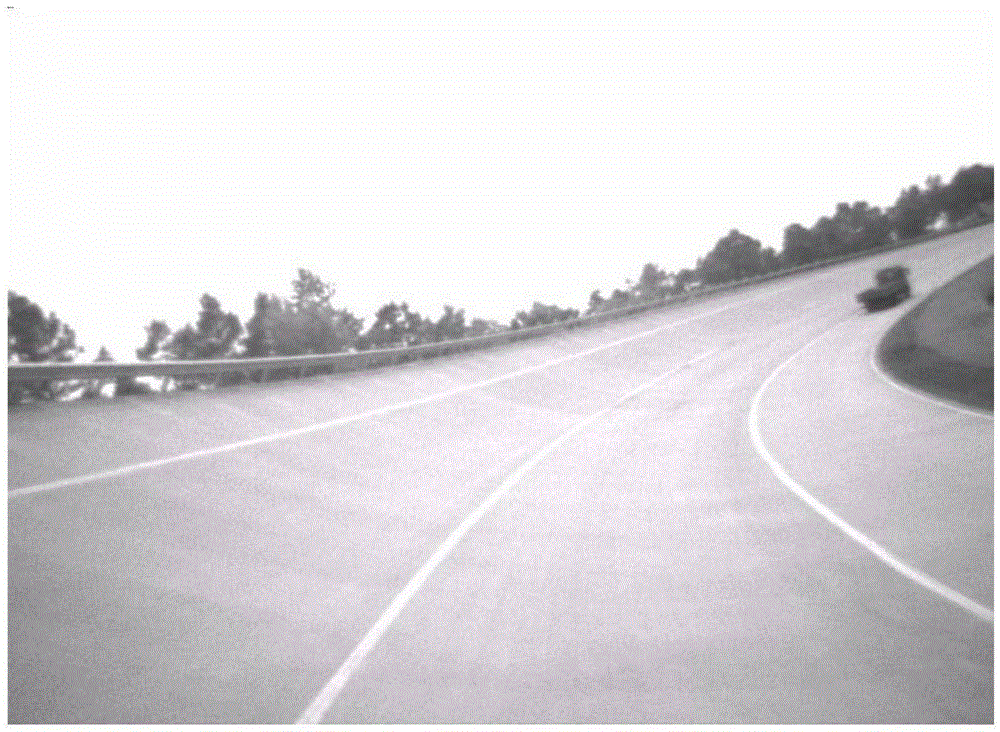
[0066] A lane detection method based on an adaptive region of interest, the specific steps comprising:
[0067] (1) Acquire road images; such as figure 1 shown.
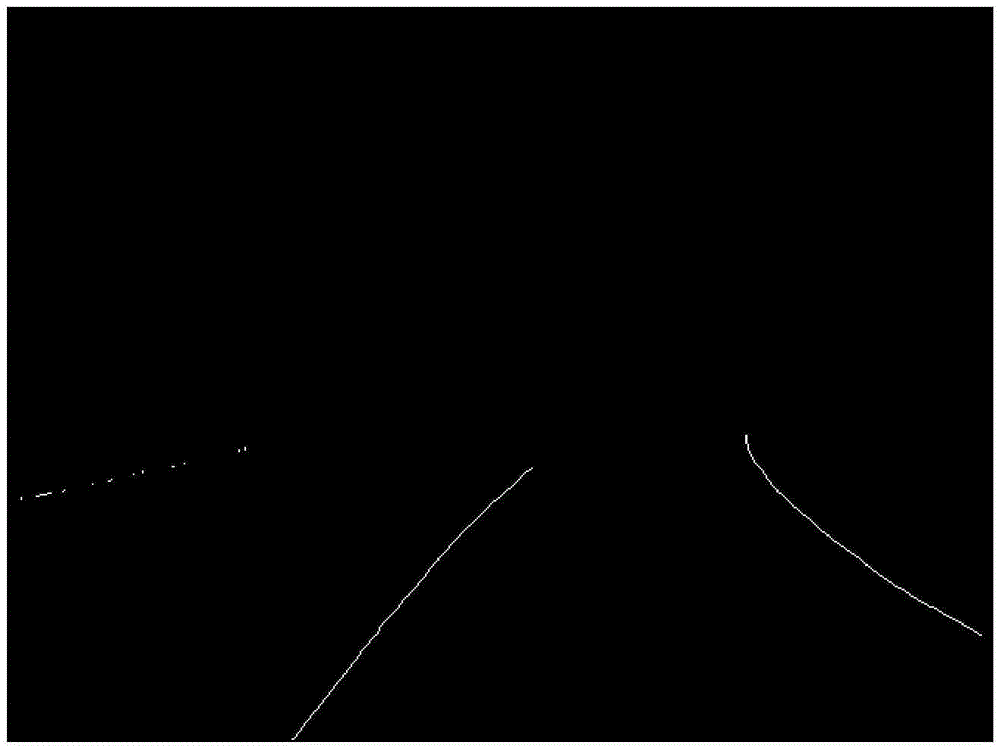
[0068] (2) The road image that step (1) is acquired is carried out preprocessing, eliminates non-lane noise, and described non-lane noise refers to the noise produced by other non-lane factors such as sky, tree, road surface, guardrail; Obtain main information as lane Image:
[0069] 1. The improved Sobel edge detection algorithm is used to perform edge detection on the road image obtained in step (1);
[0070] ② Use the optimal threshold binarization method to perform image binarization on the road image obtained in step ①:
[0071] The preprocessed image is as figure 2 shown;
[0072] a. Set the gray value x(m,n) of the road image with a size of M×N at coordinates (m,n) as shown in formula (I):
[0073] x(m,n)=s(m,n)+w(m,n)(I)
[0074] In formula (Ⅰ), M is the number of columns of the road image; N is the n...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More