

Six-limb insect motion mode determination method, bionic six-limb insect robot and use method thereof
A technology of robots and insects, which is applied in the field of bionic robots, can solve problems such as inability to manufacture robots that can adapt to road conditions, unclear movement modes of hexapods, and high-difference bionic hexapods.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
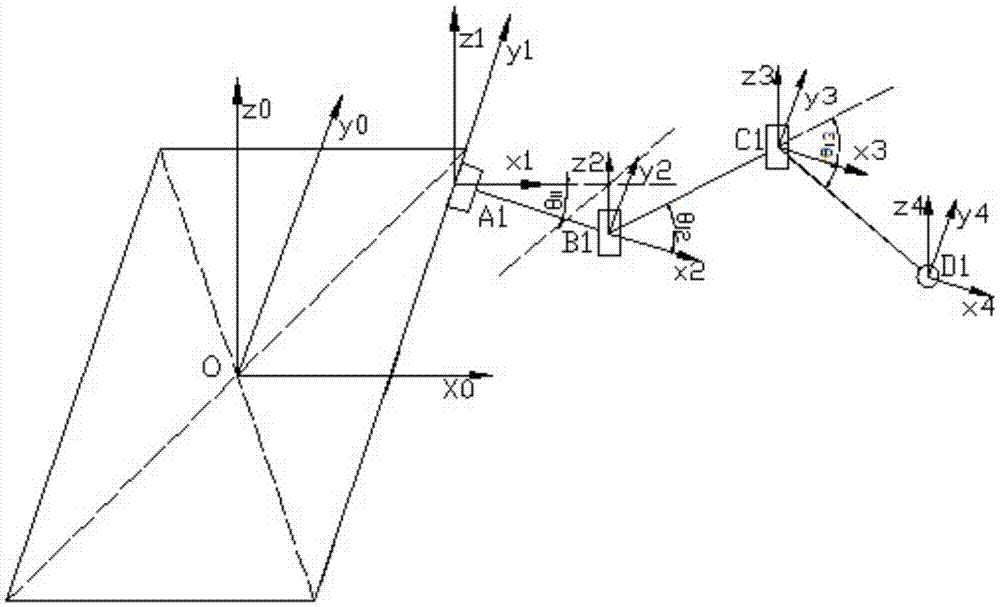
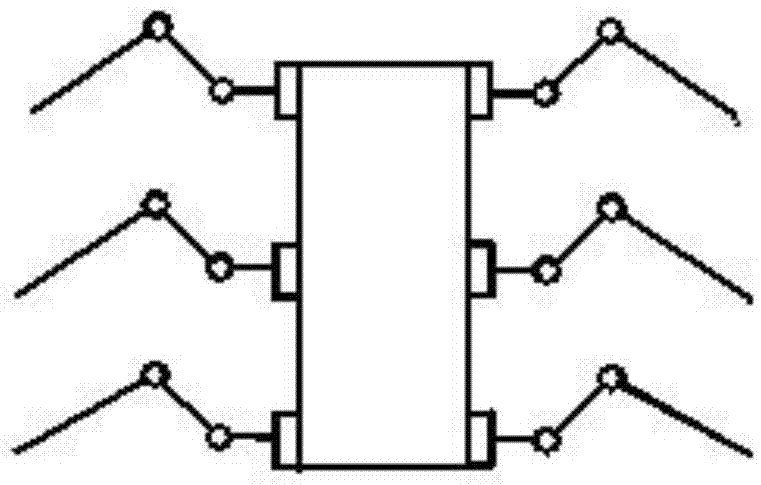
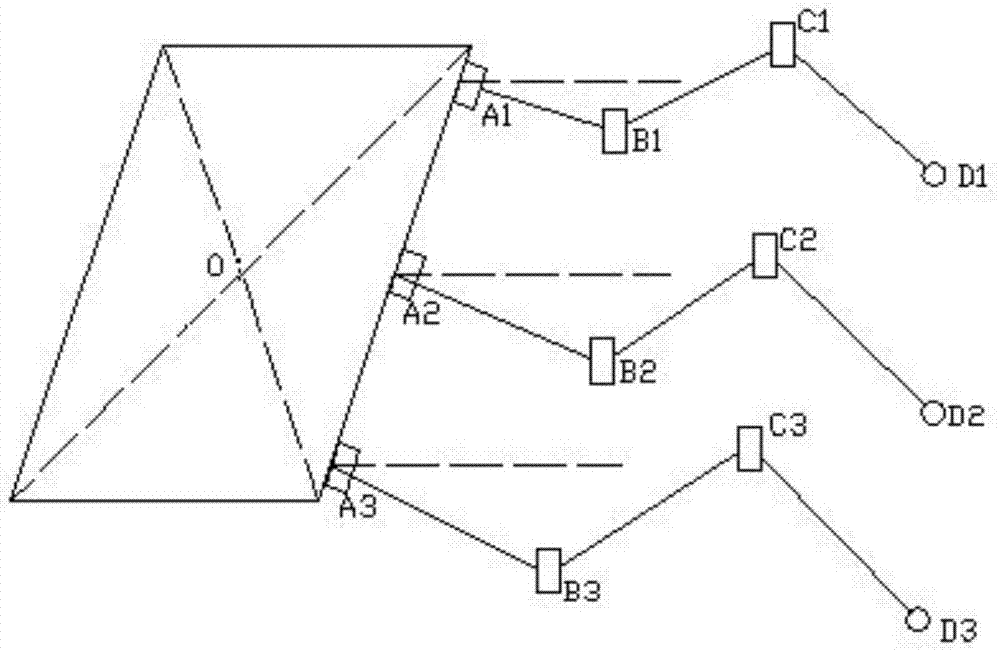
[0155] Such as figure 1 As shown, a bionic insect robot with six limbs includes a body and limbs. The limbs include a pair of forelimbs, a pair of middle limbs and a pair of hind limbs. Set on both sides of the middle of the body, a pair of hind limbs are symmetrically set on both sides of the rear end of the body; forelimbs, middle limbs and hind limbs all include big arms, middle arms and forearms; the big arms are connected to the body; the middle arms are connected to the big arms ; The length of the forelimb arm is S 1 =50mm, the length of the middle arm of the forelimb is S 2 =150mm, forearm length is S 3 =200mm; the length of middle limb and upper arm is S 1 =60mm, the length of middle limb and middle arm is S 2 =180mm, the length of middle limb and forearm is S 3 =240mm; the length of the upper arm of the hind limb is S 1 =72mm, the length of the middle arm of the hind limb is S 2 =216mm, forearm length is S 3 =288mm; the connection angle between the upper arm ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More