Single-freedom-degree rotating joint of underwater robot
A technology of underwater robots and rotary joints, which is applied in the field of robots, can solve the problems of unfavorable joint sealing of rods and the installation of rod shells, etc., and achieve the effect of simplifying joint structure and sealing structure and good sealing effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
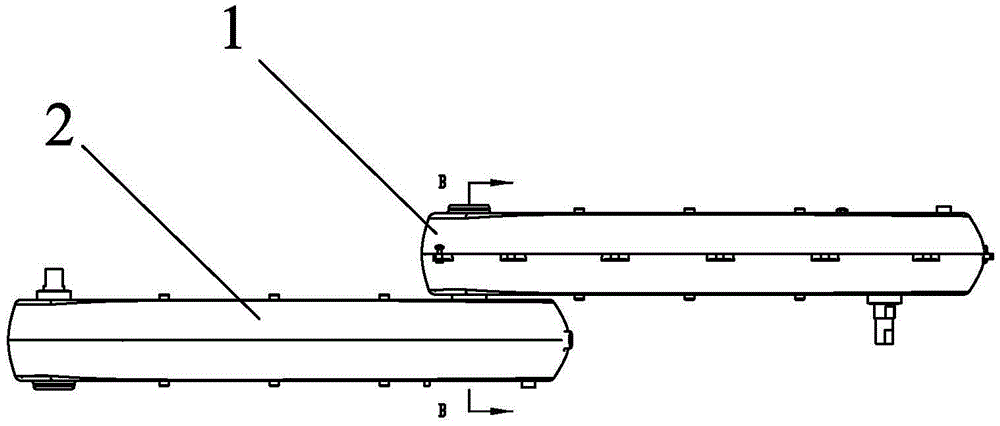
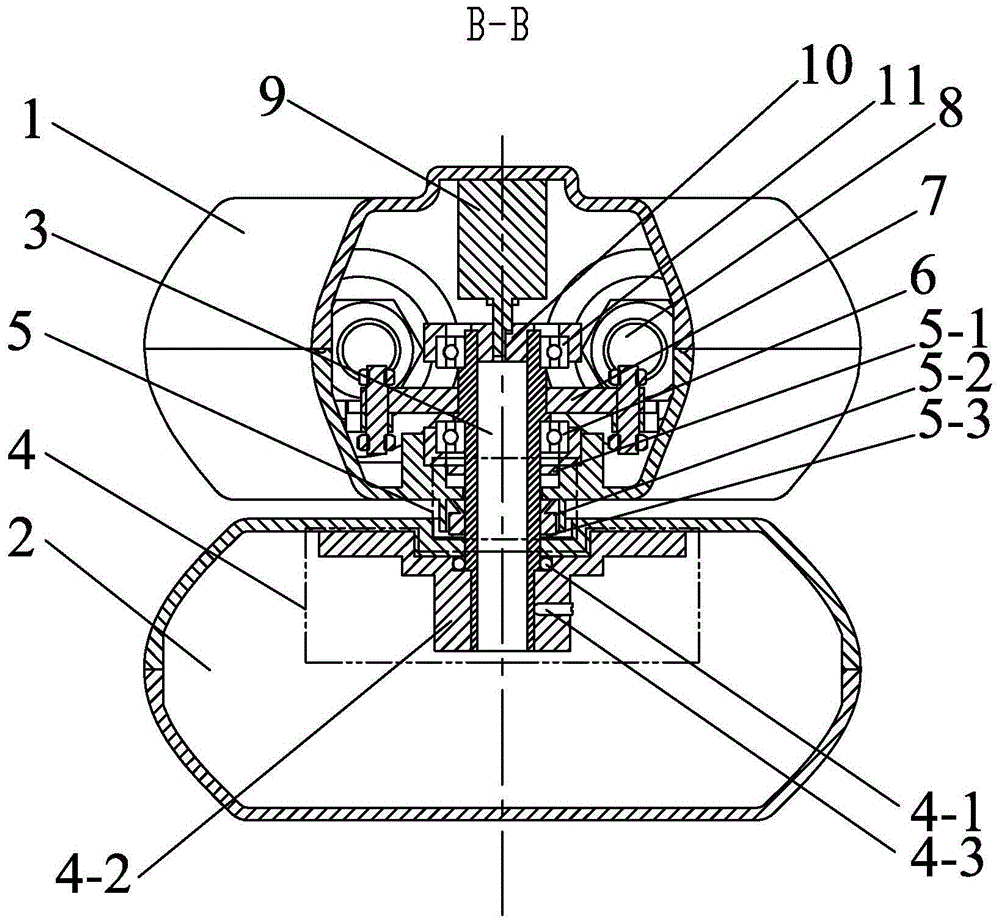
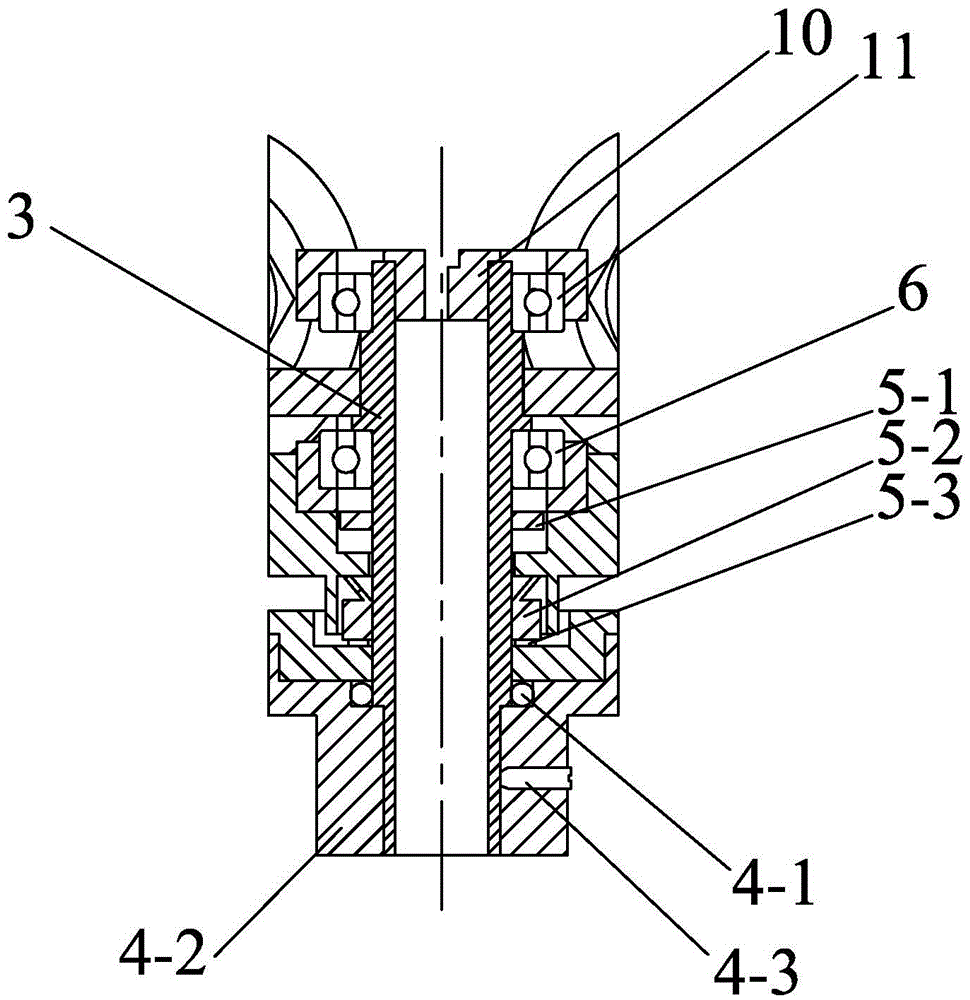
[0012] Specific implementation mode one: combine Figure 1 to Figure 3 Describe this embodiment, this embodiment is an underwater robot single-degree-of-freedom rotary joint, which includes a fixed base 1, a rotating base 2, a rotating shaft 3, a static sealing mechanism 4, a dynamic sealing mechanism 5, a first bearing 6, lever 7, two drivers 8 and encoder 9,
[0013] The fixed base 1 and the rotating base 2 are set up and down, the rotating shaft 3 is vertically installed in the fixed base 1 and the rotating base 2, and the connection between the rotating shaft 3 and the fixed base 1 and the rotating base 2 passes through The dynamic sealing mechanism 5 is sealed, the inside of the rotating base 2 is sealed and connected with the rotating shaft 3 through the static sealing mechanism 4, the encoder 9 is installed on the upper end of the rotating shaft 3 in the fixed base 1, and the lever 7 and the first bearing 6 are sequentially set on the On the rotating shaft 3, the lever...
specific Embodiment approach 2
[0022] Specific implementation mode two: combination Figure 1 to Figure 3 To describe this embodiment, the rotating shaft 3 of this embodiment is provided with a protruding shoulder, and the lever 7 is clipped on the protruding shoulder of the rotating shaft 3 . Set it up like this: Provide positioning for the lever. Other compositions and connections are the same as in the first embodiment.
specific Embodiment approach 3
[0023] Specific implementation mode three: combination Figure 1 to Figure 3 The present embodiment will be described. The output end of the encoder 9 of the present embodiment is a D-shaped shaft. The benefit of such setting is: it is convenient to connect with the rotating shaft 3 . Other compositions and connections are the same as those in the second embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More