

A road sign arrangement optimizing method and a corresponding robot positioning method
A layout method, robot technology, applied in the direction of instruments, measuring devices, surveying and mapping, and navigation, etc., can solve the problems of limited application and difficulty in obtaining high reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0067] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several changes and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
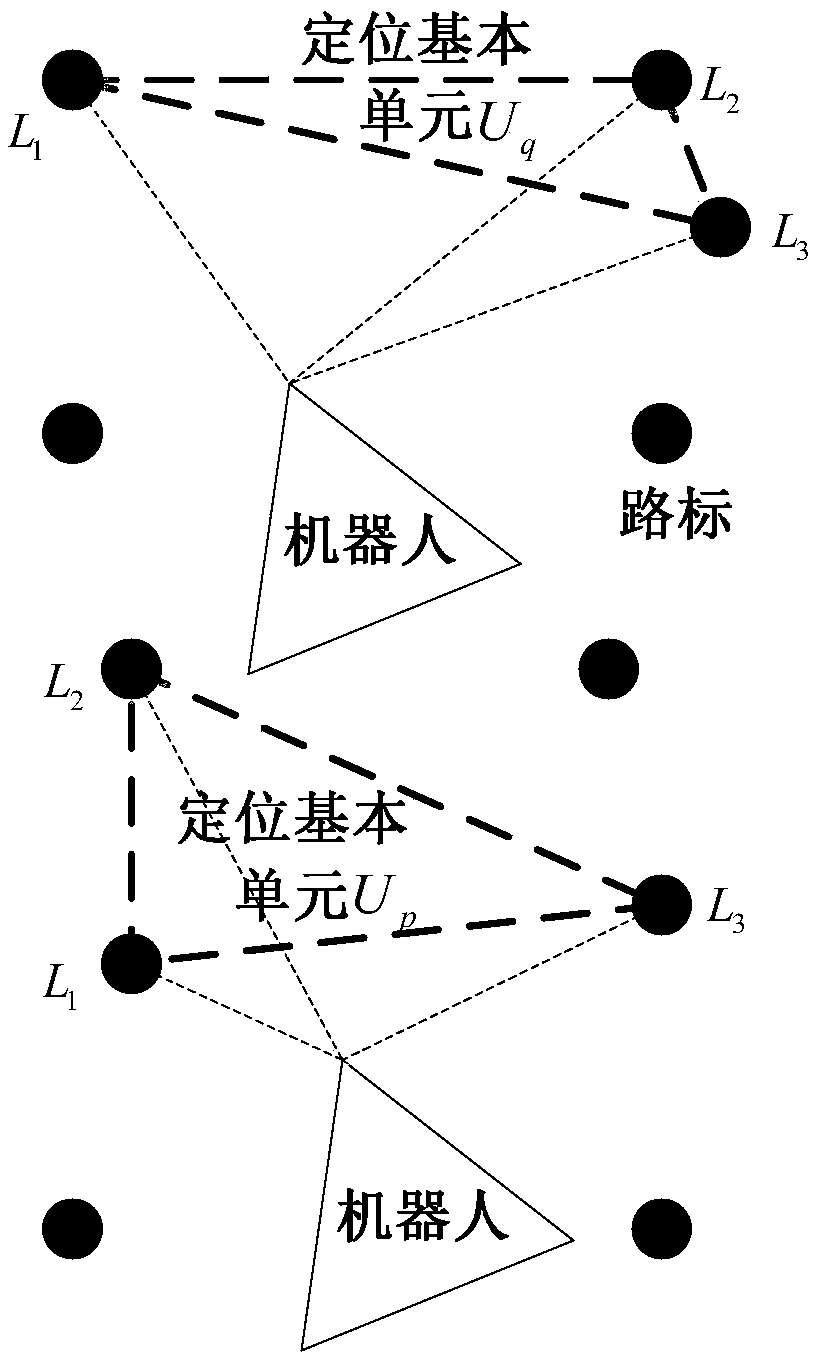
[0068] The invention provides a method for optimally arranging artificial road signs and a corresponding robot positioning method. The optimal layout method of landmarks, which arranges the same landmarks in the environment, the single landmarks observed by the sensor have the same characteristics, and m landmarks within the sensor field of view are used as the basic unit of robot positioning, and the characteristic of the basic positioning unit is the distance between landmarks Spatial position relatio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More