

Gait control method and device for dual-foot robot
A biped robot and gait control technology, applied in the field of robotics, can solve the problems of poor walking stability in the starting and stopping stages, and the inability to enter the walking state stably, so as to increase stability, improve efficiency, and achieve stable start and end Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
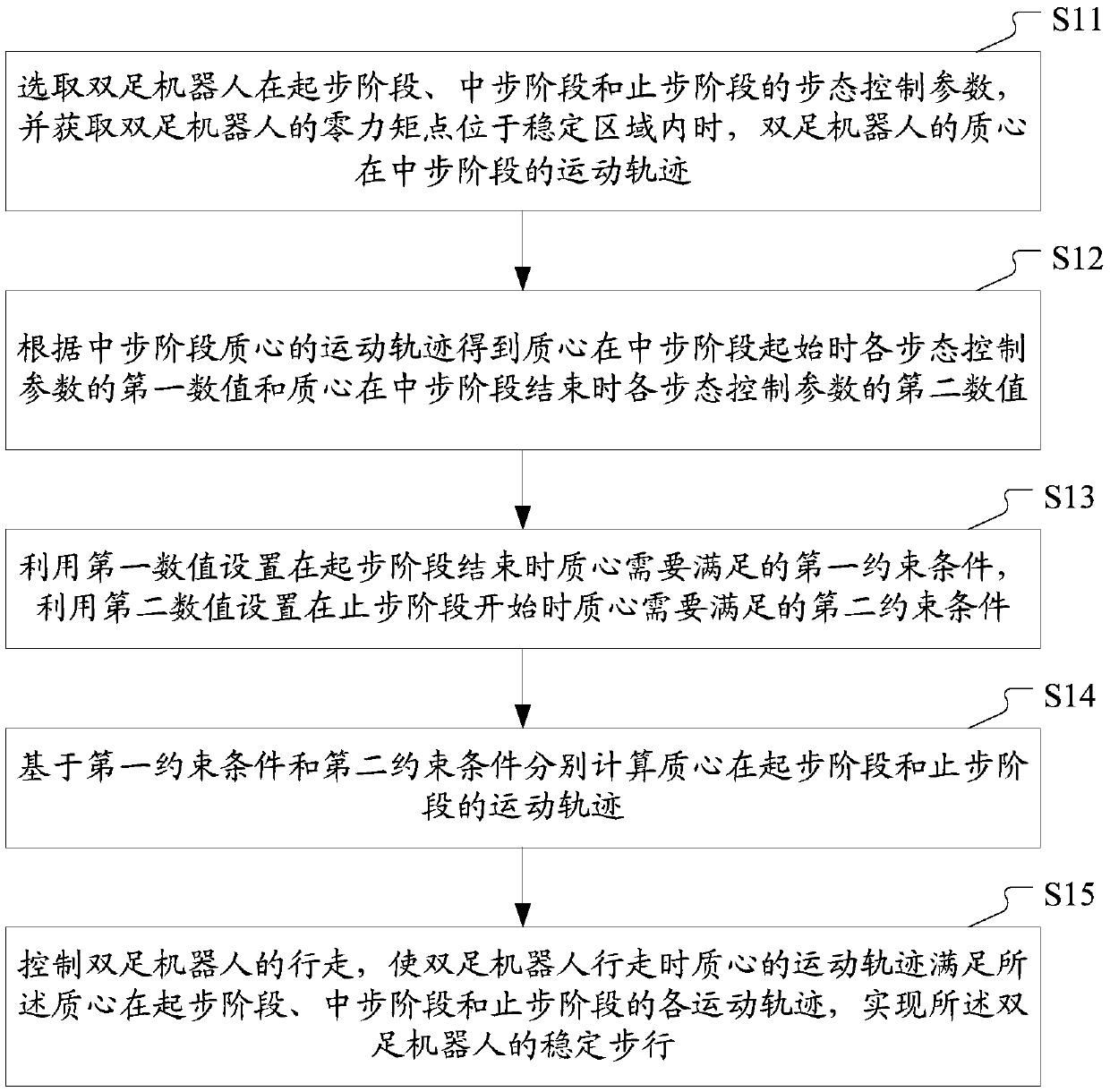
[0027] The technical solution of the embodiment of the present invention proposes a complete gait control solution for stable walking of a biped robot, which can more effectively realize stable starting and stopping. Moreover, by obtaining the motion trajectory of the middle step stage under the premise that the zero moment point always falls within the stable area, the motion trajectory of the start, stop and middle step stages are reasonably connected in terms of position, speed and / or acceleration , to ensure that the stability conditions are met in both the start and start phases. In addition, this solution utilizes the conversion between potential energy and kinetic energy when the robot moves, and can quickly start and end the normal walking process within one step, avoiding the need for several stages in the existing solution to reach and end the normal walking state. The problem is to realize the stable and fast walking of the biped robot.
[0028] figure 1 It is a s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More