

Robot path planning method
A path planning and robot technology, which is applied in the direction of instruments, motor vehicles, vehicle position/route/height control, etc., can solve problems such as easy to fall into local optimal solution and low convergence speed, and achieve short calculation time and good result stability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
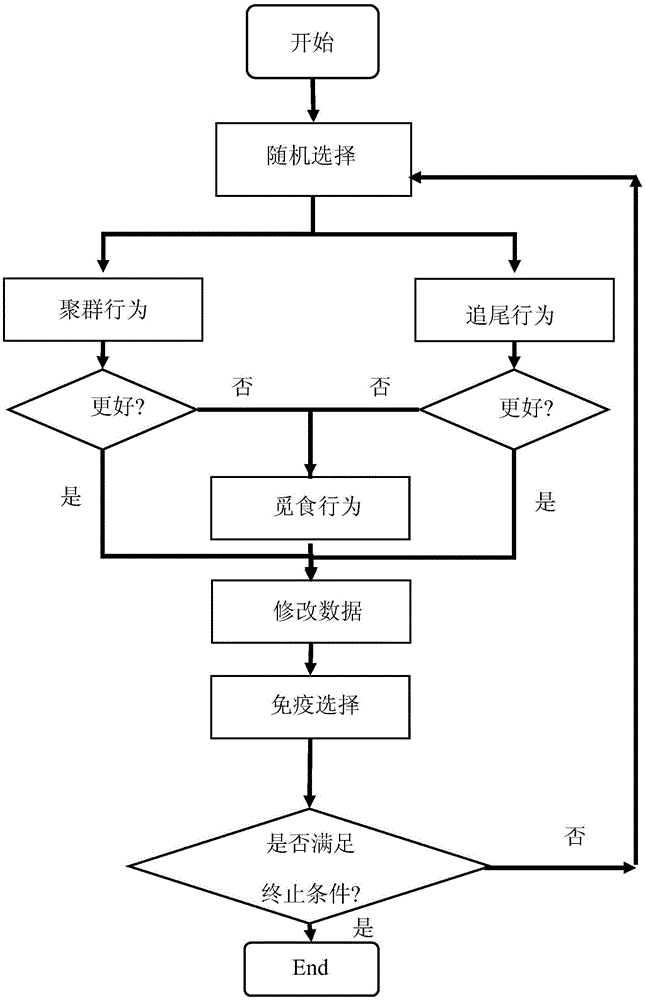
[0043] In view of the decrease in the convergence speed of the traditional AFSA algorithm in the later stage, the present invention adds a direction operator to the state of a single fish in the fish school to improve the fish school's behavioral ability and success rate of foraging, clustering, rear-end chasing, etc., which is beneficial to speed up the convergence speed. At the same time, the immune memory feature is introduced into the artificial fish swarm algorithm to improve the global search ability of the algorithm and enhance the ability to avoid being limited to local solutions. We call this improved algorithm Immune-Directional Artificial Fish Swarm Algorithm (Immune-Directional Artificial Fish Swarm Algorithm, IDAFSA )algorithm.
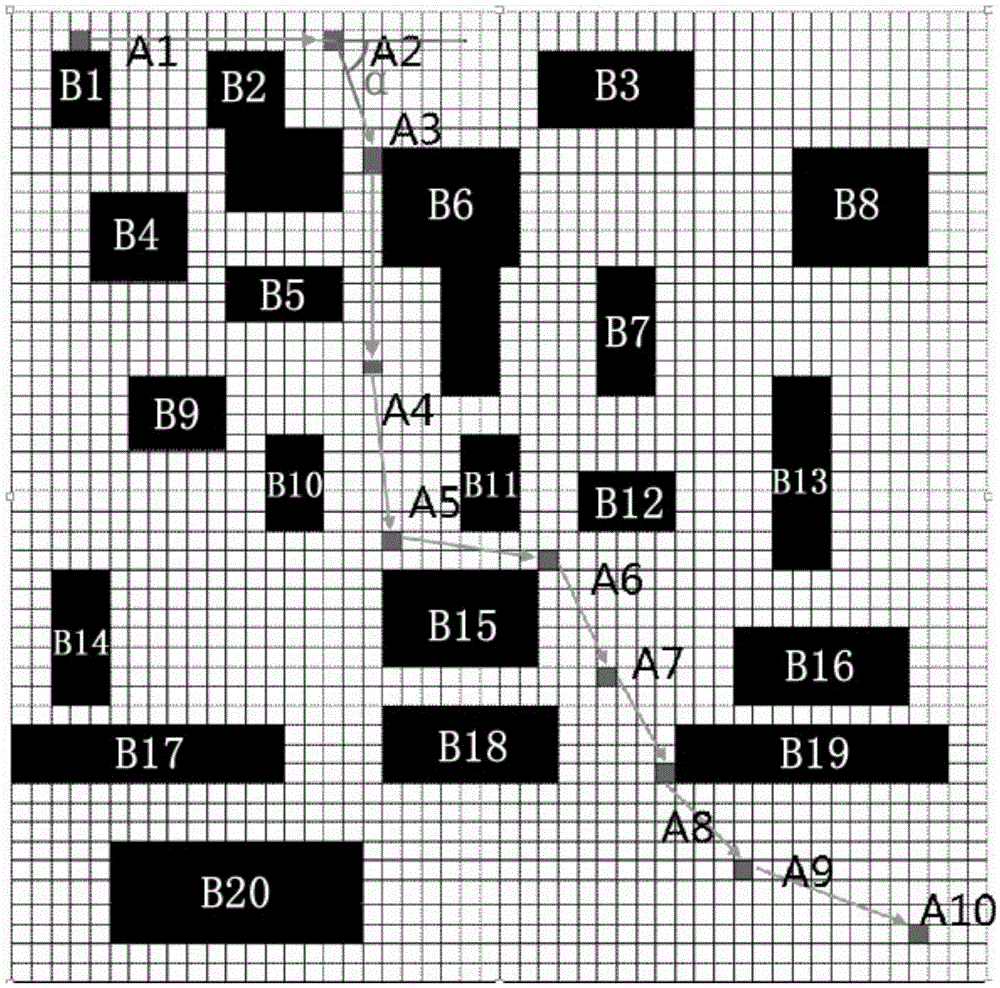
[0044] A robot path planning method based on the immune-directional artificial fish swarm algorithm, such as figure 1 As shown, it specifically includes the following steps: First, determine the entire environment model, including the sta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More