

Automatic welding control method based on hand-eye coordination of mechanical arm
A hand-eye coordination and autonomous welding technology, applied in manipulators, program-controlled manipulators, welding equipment, etc., can solve problems such as fatigue-prone operation efficiency, difficulty in welding positioning at the end of the manipulator, and heavy mental burden on operators.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
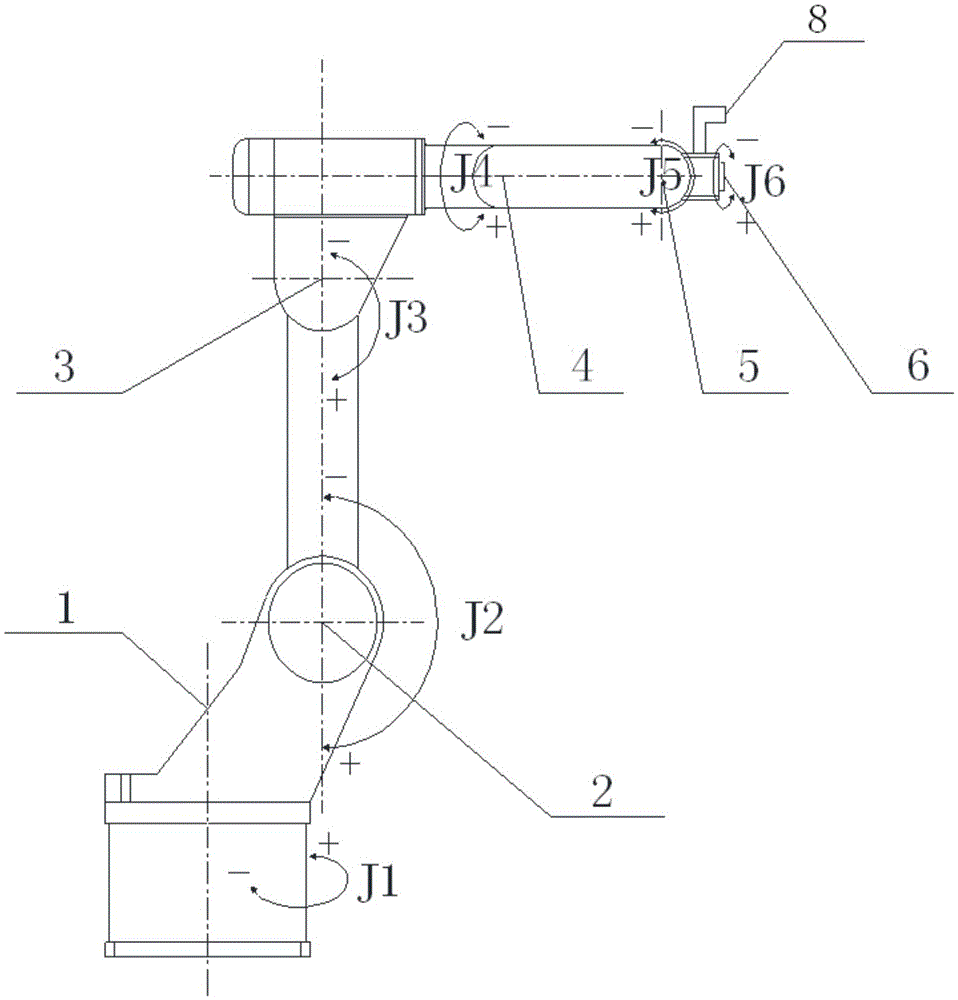
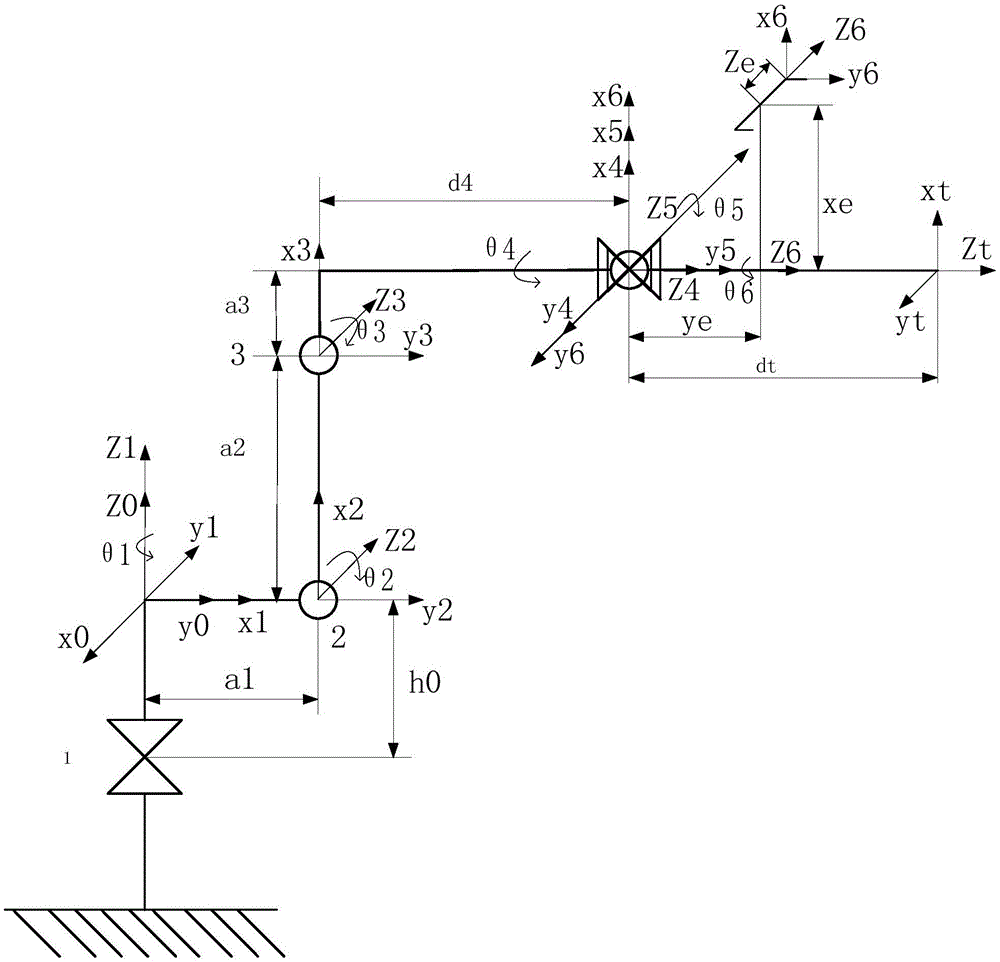
[0065] Such as figure 1 , 2 shown. The invention discloses an autonomous welding control method based on hand-eye coordination of a mechanical arm, which can be realized through the following steps:
[0066] (1) Manual remote operation of the manipulator, so that the binocular vision moves along the weld seam to measure the coordinates of the weld seam within the optimal range of the distance from the weld seam, and converts the measured weld seam coordinates from the measurement base coordinates of the binocular vision to the manipulator base coordinates;
[0067] (2) Calculate the operation pose matrix of each point of the weld;
[0068] (3) calling the kinematics inverse transformation method to obtain the angle sequence of each joint inverse solution of the manipulator;
[0069] (4) Manually set the operation parameters to complete one-time welding.
[0070] The optimal range of the binocular vision in the above step (1) at the distance from the weld refers to selecti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More