

Trace-driven manipulator
A driven, manipulator technology, used in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of high price, complex structure, and short life of manipulator fingers. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
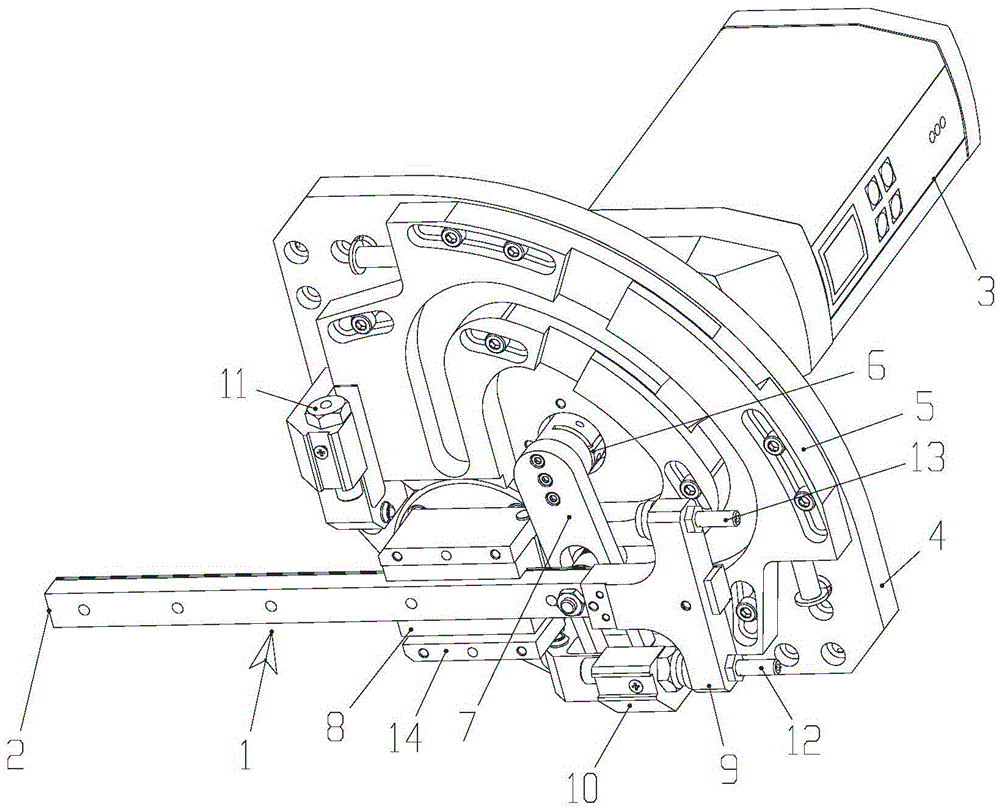
[0034] The present invention will be further described in detail below in conjunction with the accompanying drawings, but does not constitute any limitation to the present invention. Similar component numbers in the accompanying drawings represent similar components. As mentioned above, the present invention provides a track-driven manipulator for grasping and transferring materials.
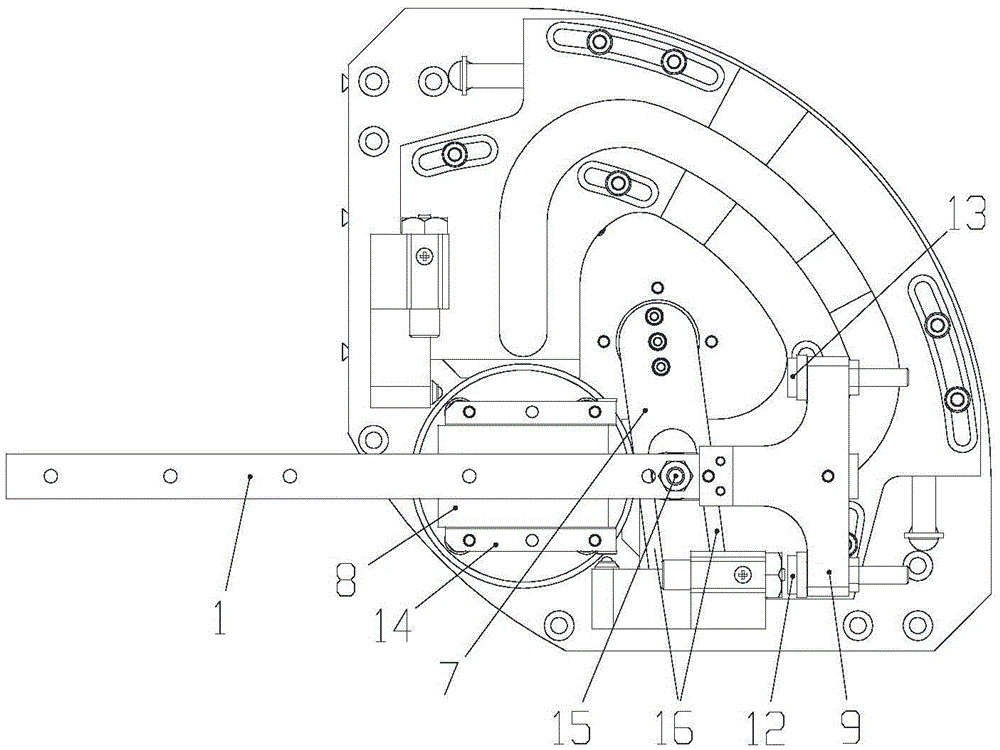
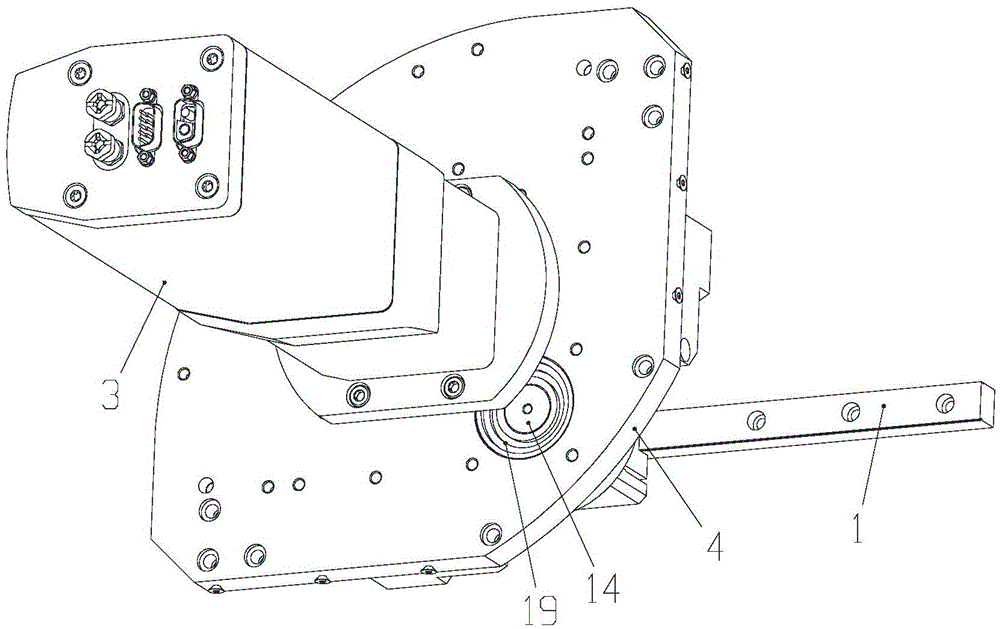
[0035] figure 1 It is a schematic diagram of the three-dimensional structure of the track-driven manipulator of the present invention, figure 2 It is a structural schematic diagram of the track-driven manipulator of the present invention in another perspective, image 3 It is a structural schematic diagram of the track-driven manipulator of the present invention in another perspective, Figure 4 , 5 It is a structural schematic diagram of the cam mechanism of the track-driven manipulator of the present invention, Figure 6 , 7 It is a structural schematic diagram of the motion assembly of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More