Hand-throwing taking-off method and system for unmanned aerial vehicle
A technology of unmanned aerial vehicles and pilots, applied in the field of hand-throwable small unmanned aerial vehicles, can solve the problems of high operational skill requirements, low take-off success rate, poor stability, etc., and achieve high safety factor, low error rate, and reliability high effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The following is a detailed explanation and illustration of the drone's hand-throwing take-off method and the hand-throwing take-off system of the present invention in conjunction with the accompanying drawings.
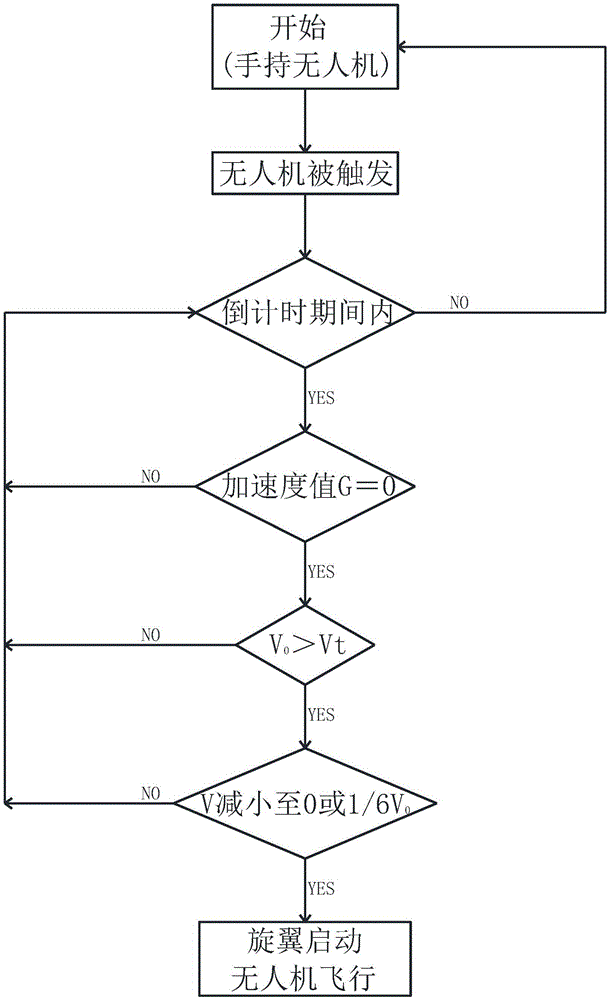
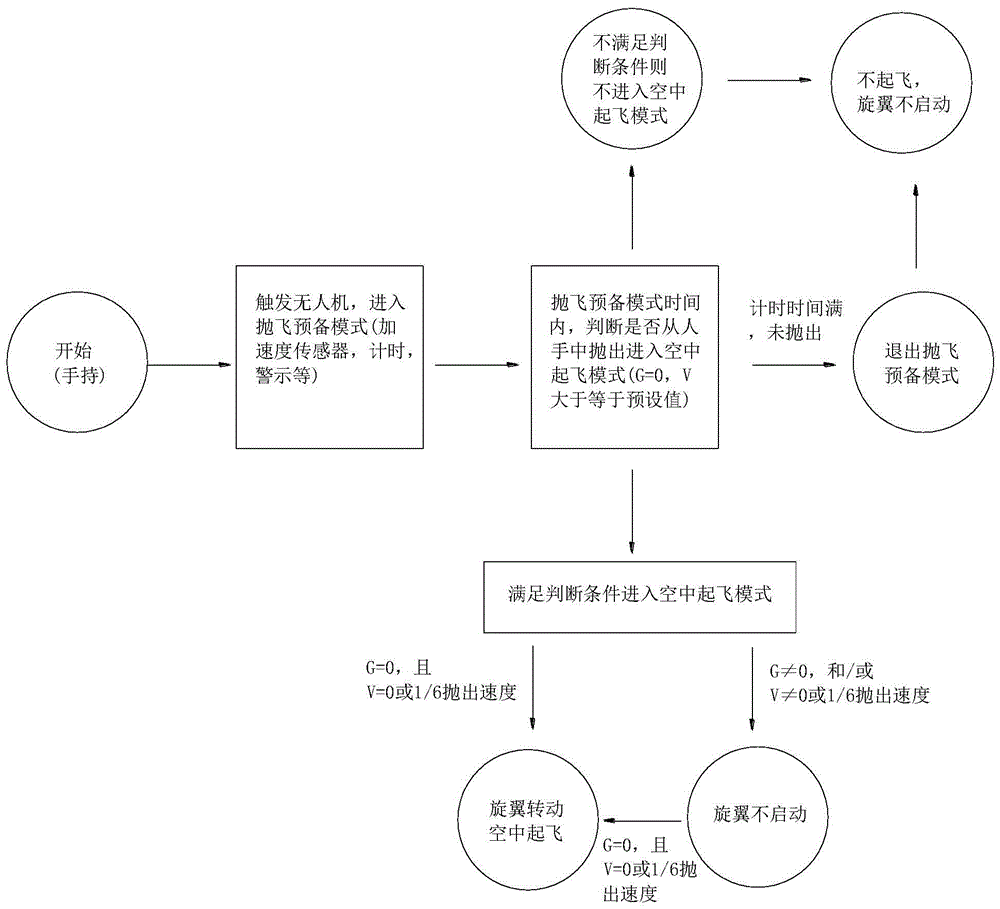
[0028] The hand-throwing take-off method of the present invention is to throw the UAV into the air by human hands, and the UAV intelligently recognizes the take-off time in the air, and then enters the normal flight state after being started in the air. During the whole process, the user only needs to trigger and throw two actions to successfully complete the take-off of the drone.
[0029] Such as figure 1 , 2 , shown in 3, a kind of unmanned aerial vehicle hand-throwing take-off method, this method comprises the steps:
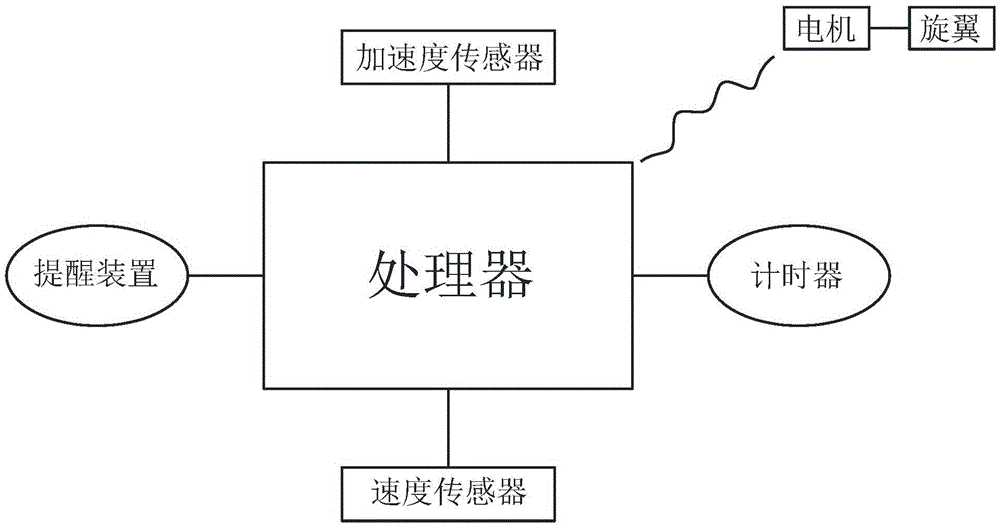
[0030] Step 1: The user triggers the UAV and puts the UAV in the pre-throwing state, that is, makes the UAV ready for take-off and waits for the user's next operation; the specific trigger method can be selected by those skilled in the art...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com