

A Motion Planning and Control Method for Parallel Manipulator
A motion planning and control method technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as reducing the efficiency of work and consuming operator time, and achieve the effect of simple design, high precision and easy operation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be further explained below in conjunction with the accompanying drawings. The accompanying drawings are for illustrative purposes only, and cannot be construed as limiting the present invention; in order to better illustrate this embodiment, some parts in the accompanying drawings will be omitted, enlarged or reduced; for those skilled in the art, certain parts in the accompanying drawings It is understandable that some well-known structures and descriptions thereof may be omitted.
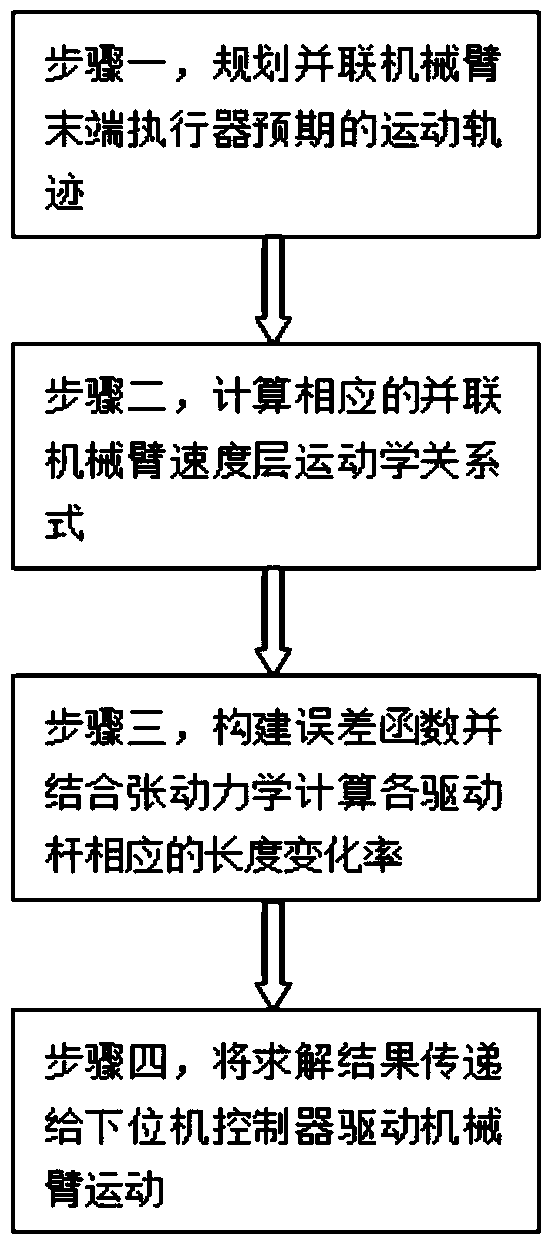
[0023] Such as figure 1 A motion planning and control method of a parallel manipulator is shown, including: step 1, planning the expected motion trajectory of the end effector of the parallel manipulator, including the expected pose r of the end effector d and expected pose change rate Step 2: Calculate the corresponding parallel manipulator velocity layer kinematics relation according to the specific parallel manipulator parameters in is the length change ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More