

A robot elastic joint with adjustable stiffness
A technology of elastic joints and robots, applied in the directions of manipulators, manufacturing tools, joints, etc., can solve the problems of poor versatility, non-linear adjustment of stiffness, loose flexible joint structure, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The purpose of the present invention will be further described in detail through specific examples below, and the examples cannot be repeated here one by one, but the implementation of the present invention is not therefore limited to the following examples.
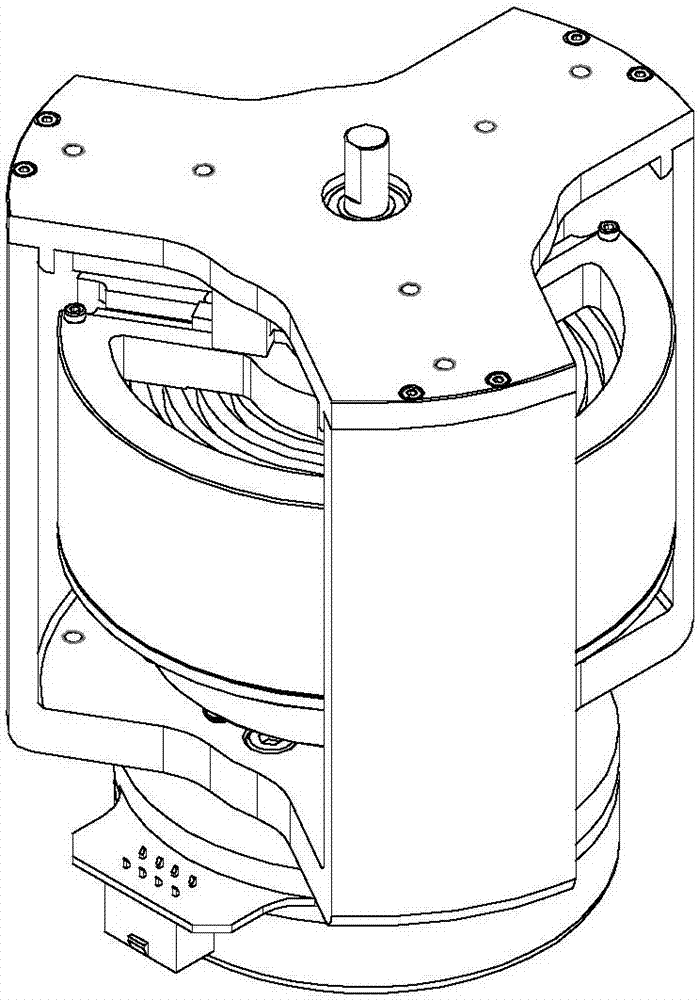
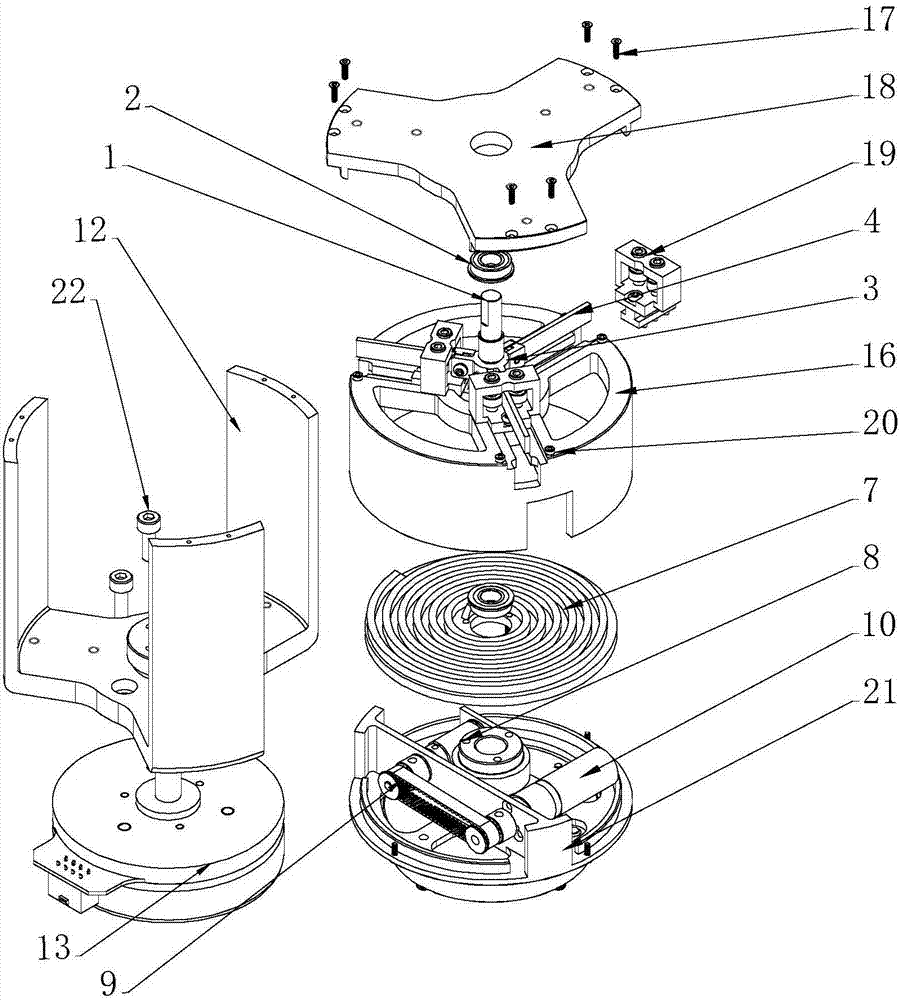
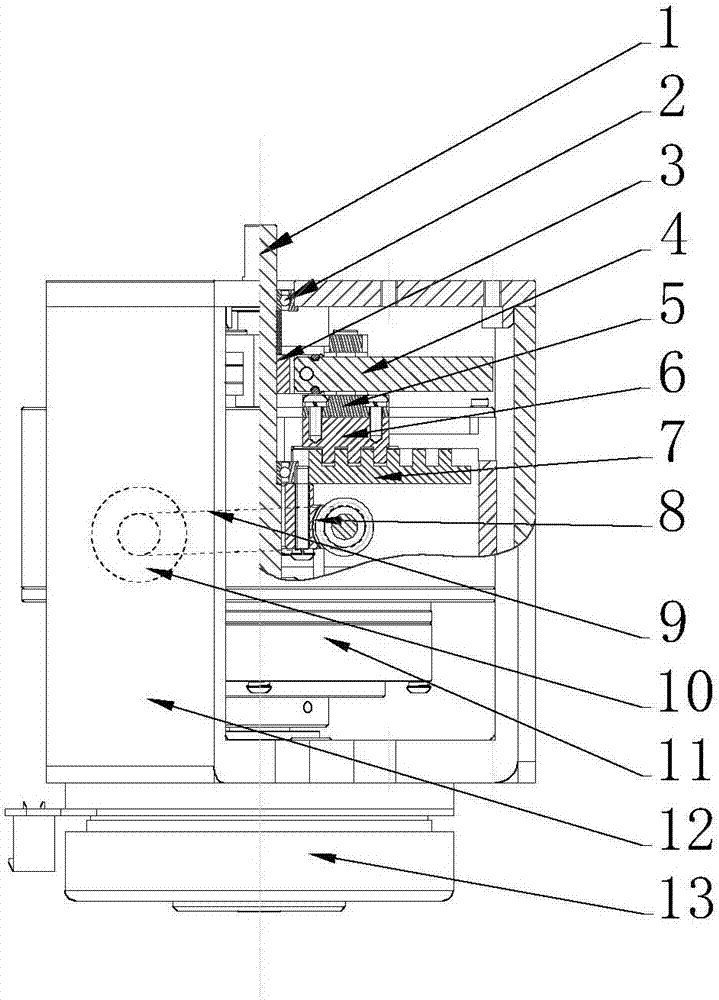
[0026] like Figure 1 to Figure 4 As shown, a robot elastic joint with adjustable stiffness includes a joint skeleton, a driving end and an output shaft 1 respectively arranged at both ends of the joint skeleton, and also includes a 1, the stiffness adjusting device includes a rotating body connected to the driving end, an elastic force transmission member connected between the rotating body and the output shaft 1 and rotating around the axis of the output shaft 1 under the push of the rotating body, When the output shaft 1 is impacted by different loads, it is an adjustment mechanism for adjusting the length of the force arm when the rotating body drives the elastic force transmission component to rotate.
[002...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More