

Independent steering driving wheel for mobile robot
A mobile robot and independent steering technology, which is applied in the field of mobile robots, can solve the problems of inconvenient special workplaces, small rotation range, small and flexible enough, etc., and achieve compact and beautiful structure, simple structure improvement, and large wiring space Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0012] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
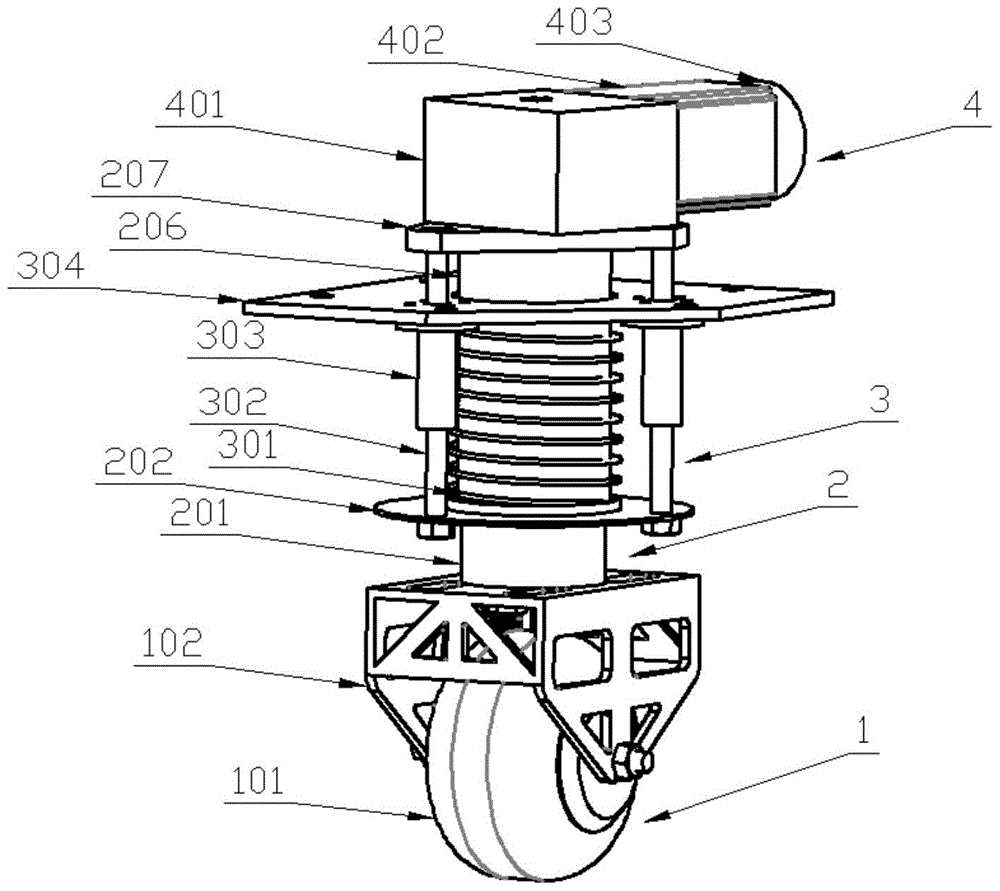
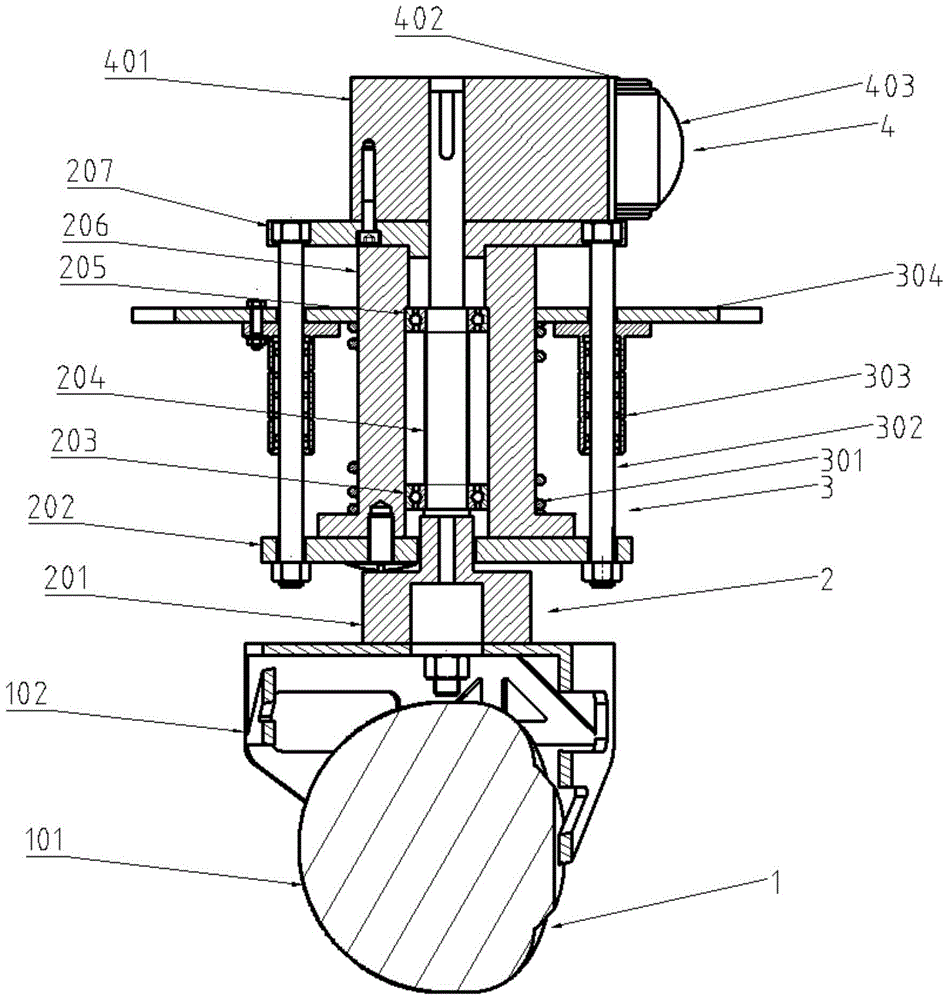
[0013] see figure 1 , figure 2 , an independent steering drive wheel of a mobile robot, including a traveling mechanism 1, a force supporting mechanism 2, a shock absorbing mechanism 3, and a steering mechanism 4;
[0014] The traveling mechanism 1 is composed of a hub motor 101 and a wheel frame 102; the force supporting mechanism 2 includes: a hollow shaft 201, a lower flange 202, a lower angular contact bearing 203, a shaft sleeve 204, an upper angular contact bearing 205, a bearing Seat 206, upper flange 207; said damping mechanism 3 includes: damping spring 301, optical axis 302, linear bearing 303, middle flange 304; damping spring 301 is coaxial with bearing seat 206, and is sleeved on The outer edge of the bearing seat; the steering mechanism 4 includes: a worm gear reducer 401 , a stepping motor 402 , and a photoelectric encoder 403...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More