Wheel and leg mechanism for wheel and leg compound type robot and control method
A compound and robotic technology, applied in the field of wheel-leg mechanism, can solve the problems of complex wheel-leg structure and large mass, and achieve the effects of light weight, simplified structure, and vibration reduction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be further described below in conjunction with the accompanying drawings.
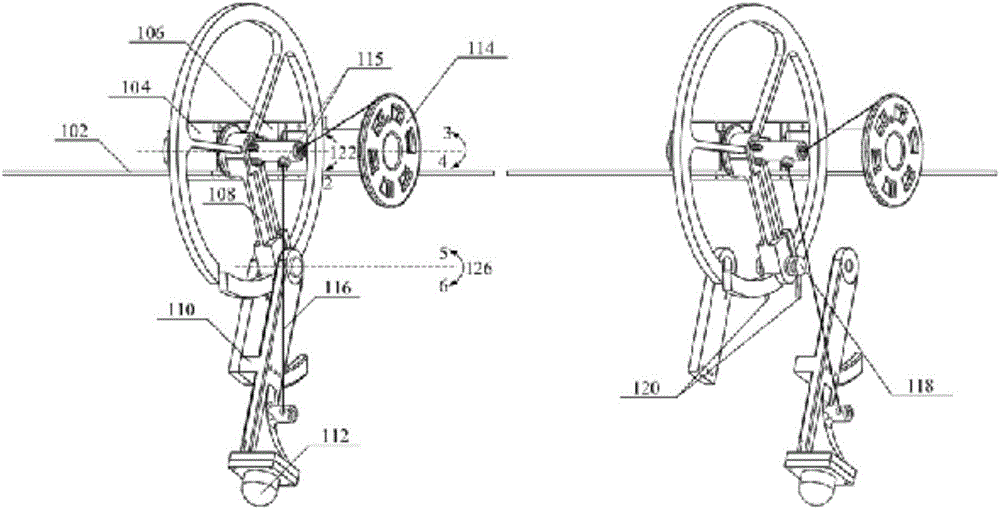
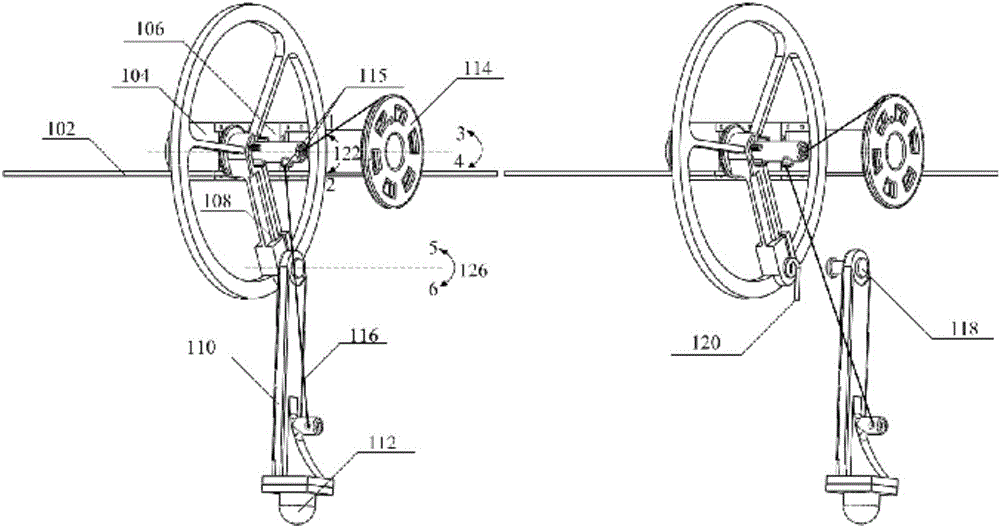
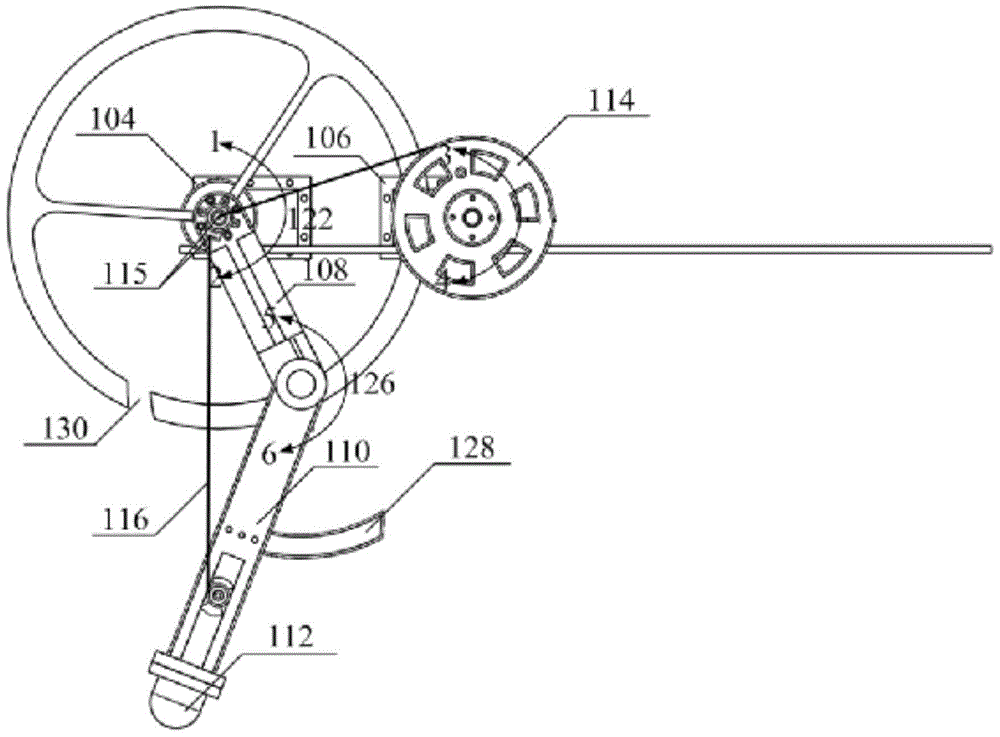
[0019] Such as figure 1 Shown is the schematic diagram of the wheel-leg mechanism embodied in the present invention. Wheel leg mechanism among the present invention comprises power machine 104, power machine 106, thigh 108, shank 110, toe 112, rotating disk 114, rope 116, hinged device 118 and a pair of torsion spring 120 of left and right rotation.
[0020] The power machines 104 , 106 are mounted on the machine body 102 . Described thigh 108 comprises round wheel and femur, and the top of described femur is fixed on the central rotating shaft of round wheel, and the end of femur is fixed on the circumference of round wheel, wherein the output shaft of power machine 104 connects the top of femur, Controlled rotation of the thigh 108 forms the hip joint 122 .
[0021] The end of the femur and the top of the lower leg 110 are hinged together by a hinge 118 to form a ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com