

Road marking line extracting method based on forward camera head in automatic driving
A technology of road marking and automatic driving, which is applied in the direction of instruments, character and pattern recognition, computer components, etc., can solve the problems of inability to obtain extraction results and interference, reduce the range of extraction accuracy, improve robustness, and execute speed high effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] In order to make the objectives, technical solutions and advantages of the present invention clearer, the present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention and are not intended to limit the invention.
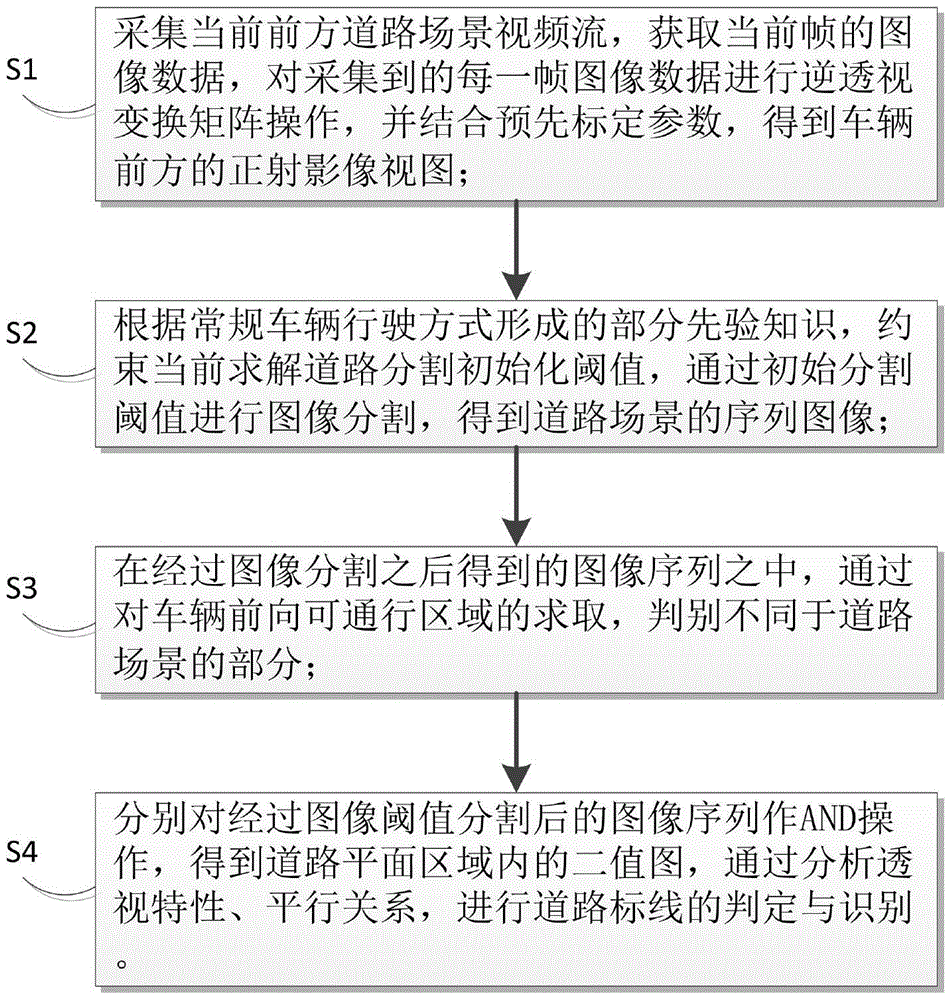
[0025] Such as figure 1 As shown, the present invention provides a method for extracting road markings based on a forward camera in automatic driving, which includes the following steps:
[0026] S1. The forward-facing camera on the self-driving vehicle collects the video stream of the current road scene ahead in real time, and obtains the image data of the current frame, performs inverse perspective transformation matrix operation on each frame of the scene image collected by the camera, and combines the pre-calibrated parameters , to obtain the fragmented orthophoto view in front of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More