

Wiring robot and wiring method for on-site calibration of mutual inductor
A technology of transformers and robots, applied in the parts, instruments, manipulators and other directions of electrical measuring instruments, can solve the problems of high safety hazards, complex tasks and high labor intensity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
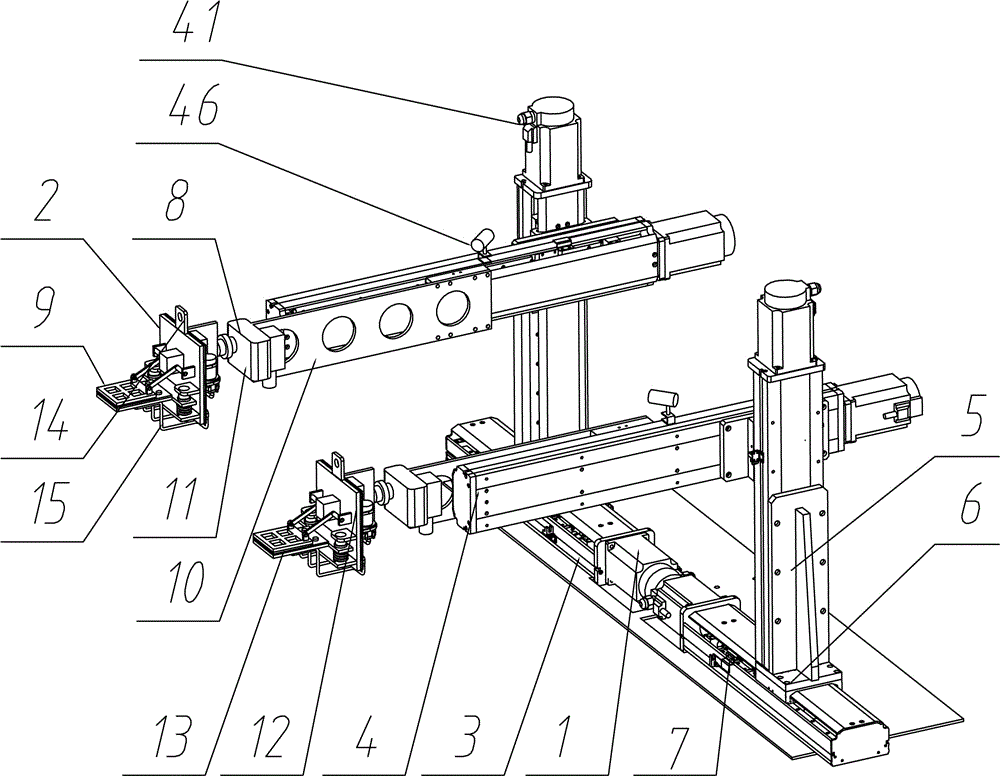
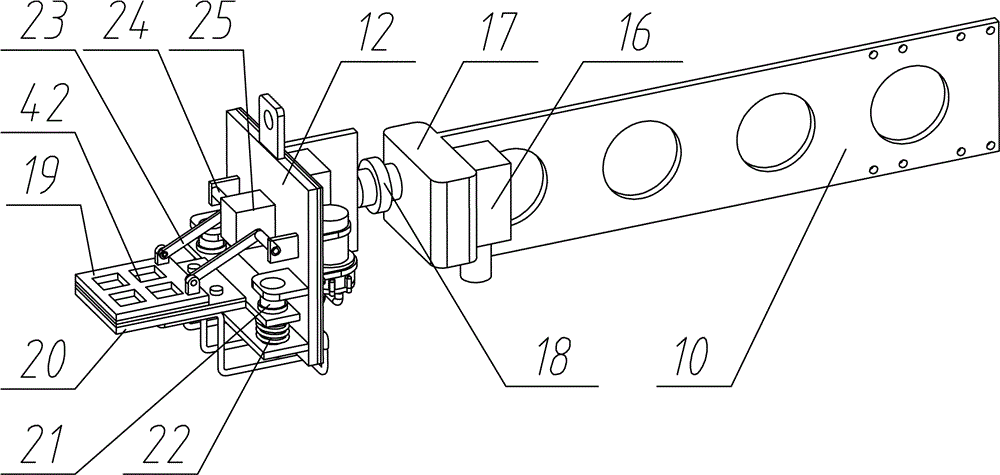
[0037] Such as figure 1 As shown, a wiring robot used for on-site verification of transformers includes a robot arm 1 and a robot arm 2. The robot arm 1 is divided into two groups, and each group of robot arms 1 includes an X-axis robot arm 3 and a Y-axis robot arm 4. and the Z-axis robotic arm 5, wherein two sets of X-axis robotic arms 3 are arranged on the same line, between each group of Z-axis robotic arms 5 and X-axis robotic arms 3, and between each group of Y-axis robotic arms 4 and Z-axis robotic arms 5 Both are slidably matched by the sliding workbench 6, and the position is adjusted by the ball screw mechanism 7; the manipulator 2 includes an angle adjustment device 8 and a wiring device 9, and the angle adjustment device 8 includes a Y-axis mechanical arm 4 that slides The connected wiring manipulator 10, the front end of the wiring manipulator 10 is connected to the wiring device 9 through the rotating mechanism 11, the wiring device 9 includes a mounting base 12, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More