

Multi-position automatic north-seeking method for uniaxial laser north seeker
A north finder and multi-position technology, applied in the field of inertial navigation, can solve problems such as not meeting user requirements, system instability, and prolonged system lock time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
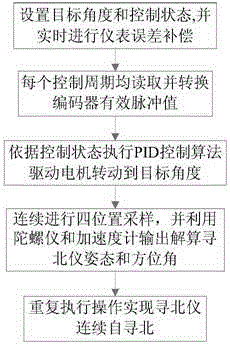
Method used
Image

Examples
Embodiment
[0106] Set the motor rotation rate VELO=14° / s, the target position threshold pulse value AngleLimit=6000, the limit stopper angle value AngleBlock=323°, the encoder pulse value CP=1048576 when the motor rotates 360°, and the control period T c =1ms, motor PWM pulse signal zero PWM 0 =576, the maximum PWM pulse signal PWM allowed by the motor ax =1000.
[0107] (1) After receiving the north-seeking command, the single-axis laser north-finder locks at the current position and reads the error compensation coefficient as shown in Table 1:
[0108] Table 1 Error Compensation Coefficient Table
[0109]
[0110] (2) Target position AngleE=0° is set, corresponding pulse value CodeAIM=0, record pointer iptr=0°, and the control state is set as the translocation state;
[0111] (3) Read the current pulse value CodeP of the encoder Now =600000, the effective rotation pulse value of the encoder CodeP 1 =600000; Motor position increment IncreP=40;
[0112] (4) Execute the PID small...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More