Method for tracking weak maneuvering target angle through airborne digital array radar
A digital array radar and maneuvering target technology, applied in the direction of radio wave reflection/re-radiation, instruments, measuring devices, etc., can solve the problems of filter divergence, limited tracking accuracy, and inability to complete target tracking tasks, etc., to achieve rapid convergence and ease The effect of filtering perturbations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] to combine figure 2 , the method for the airborne digital array radar of the present invention to track the angle of the weak maneuvering target, comprises the following steps:
[0023] The first step, airborne digital array radar and target motion scene modeling
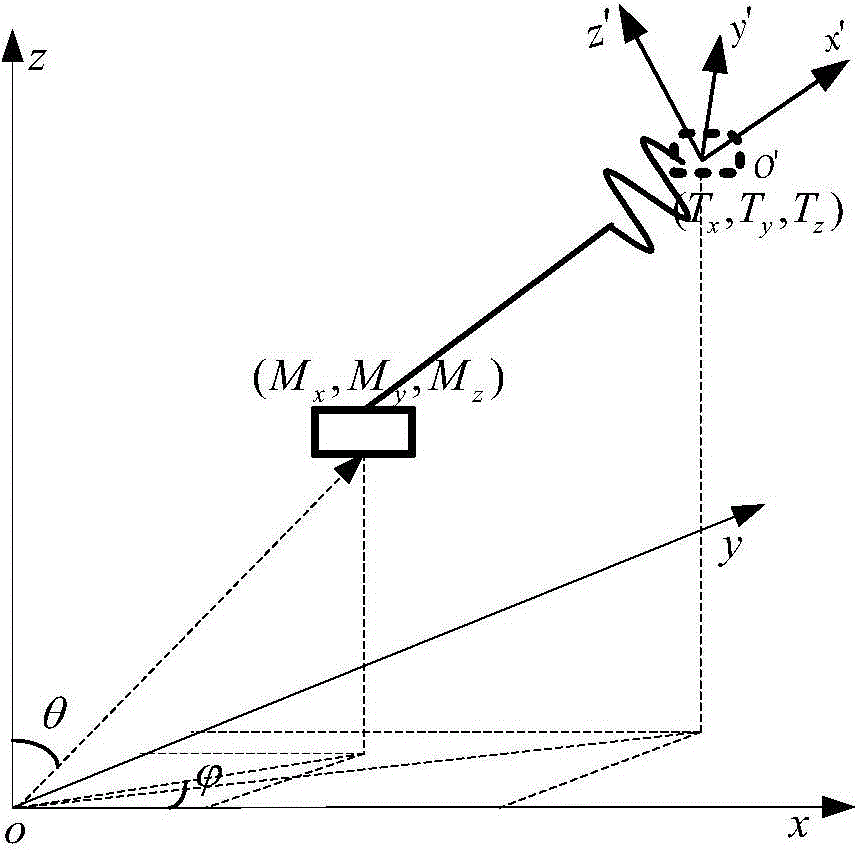
[0024] Set in the geodetic coordinate system, the abscissa M of the airborne digital array radar at time 0 of the system x =4000, vertical coordinate M y =5000, vertical coordinate M z =10000, target abscissa T x =7939.6, ordinate T y =9768.1, vertical coordinate T z =14978.7, the unit is m, the relative position is as image 3 and Figure 4 shown. Taking the position of the target at time 0 as the origin of the coordinate system o', the airborne digital array radar points to the target as the positive direction of the x' axis, and in the x'y'z' coordinate system (the o'z' axis is located at In the vertical plane of , and o'x' to o'z' is clockwise, the o'y' axis forms a right-handed coordinate syste...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More