Cluster management and control system for substation inspection robot
A technology of inspection robot and control system, applied in the field of substation inspection, can solve the problems of wasting manpower, electric shock, waste, etc., achieve the effect of small network delay, network environment security, and improve resource utilization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] In order to make the above objects, features and advantages of the present invention more comprehensible, specific implementations of the present invention will be described in detail below in conjunction with the accompanying drawings.
[0022] In the following description, numerous specific details are set forth in order to provide a thorough understanding of the present invention. However, the present invention can be implemented in many other ways different from those described here, and those skilled in the art can make similar extensions without violating the connotation of the present invention, so the present invention is not limited by the specific implementations disclosed below.
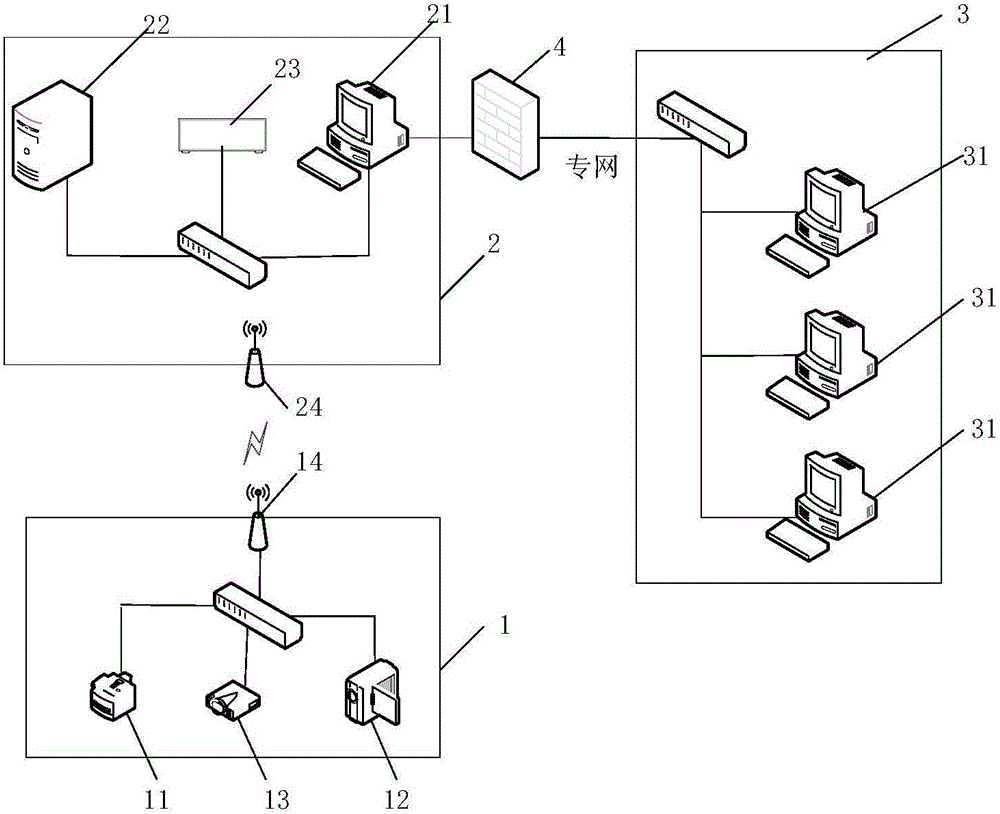
[0023] see figure 1 , the substation inspection robot cluster management and control system of this embodiment includes at least one inspection robot 1, at least one inspection and deployment vehicle monitoring background 2 and remote centralized control background 3, and the inspec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More