

Man-Machine Control System of Mobile Robot Based on Face Position and Sensitivity Parameters
A mobile robot and man-machine control technology, applied in the field of mobile robots, can solve problems such as the limited range of recognition application scenarios, and achieve the effects of ensuring accuracy and combination uniqueness, high recognition accuracy, and high user experience comfort
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The embodiments of the present invention will be described in detail below with reference to the accompanying drawings, but the present invention can be implemented in many different ways defined and covered by the claims.
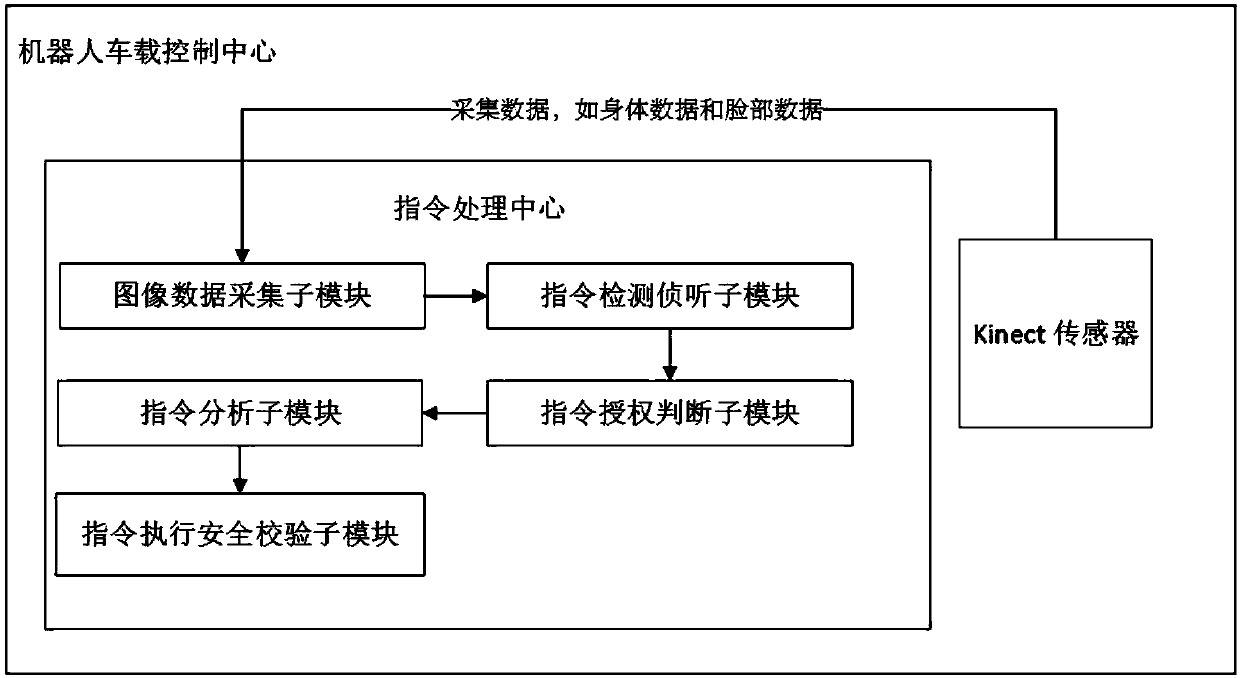
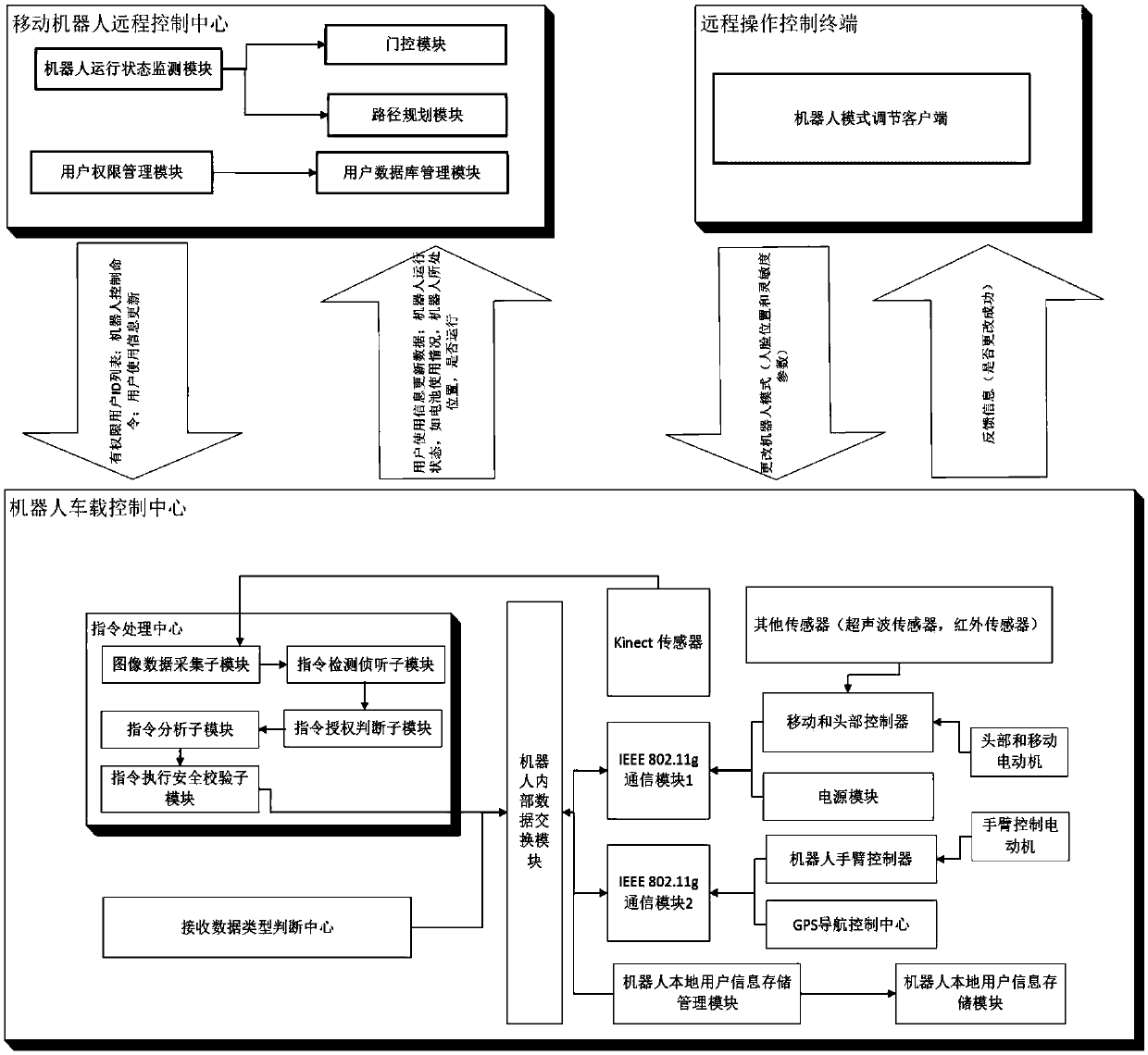
[0043] see figure 1 , the mobile robot human-machine control system based on the face position steering and sensitivity parameters of the present invention includes a robot vehicle control center, and the robot vehicle control center includes a somatosensory sensor (Adopting Microsoft's Kinect sensor in this embodiment) and an instruction processing center, somatosensory The sensor is used to collect image information data to obtain the character data in the front field of view of the mobile robot, and send the character data to the command processing center; the command processing center is used to extract the eye data in the character data according to the character data as the command control right acquisition According to the judgment basis, the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More