

Automatic grabbing machine convenient to move
An automatic and convenient technology, applied in the direction of conveyor objects, transportation and packaging, etc., can solve the problems of poor adaptability, large loss, inconvenient moving position, etc., to achieve convenient and flexible use, firm and reliable grasping, and diversified use range Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
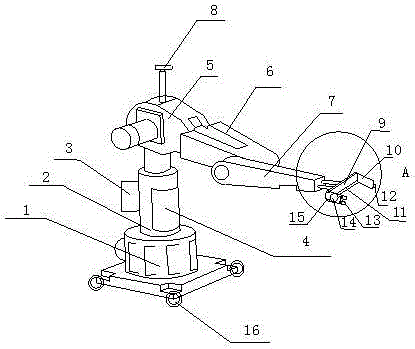
[0019] Such as figure 1 As shown, the present invention includes a base 1, and also includes a support member 2 installed on the base 1, a first arm 5, a second arm 6, a third arm 7, grabbing claws 9 and a suction cup 14, the first One arm 5, the second arm 6 and the third arm 7 are connected in series successively, and one end of the first arm 5 is also installed on the top of the support member 2, and the grab claw 9 is also connected on one end of the third arm 7; the support member The inside of 2 is also provided with interconnected controller 4 and acquisition card, motor 3 is also installed on the outer wall of support member 2, and camera 8 is also installed on the top of the first arm 5, motor 3, camera 8 and the third arm 7 all Connected on the controller 4; the grabbing claw 9 is provided with a sliding grabbing plate 10 and a chute 11, the sliding grabbing plate 10 can slide back and forth on the chute 11, and on the grabbing claw 9 and the sliding grabbing plate ...
Embodiment 2
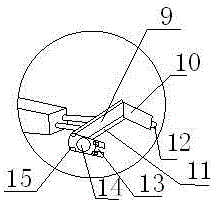
[0022] This embodiment is preferably as follows on the basis of Embodiment 1: the sliding and grabbing plate 10 can rotate parallel to the chute 11 , and the buckle 12 can rotate and be parallel to the sliding grabbing plate 10 . When the grabbing operation of the parts can be realized by moving the sliding grabbing plate at ordinary times, the buckle can be rotated to fit the sliding grabbing plate, and the buckle slot can be rotated to fit the vertical plate to avoid buckling and buckling The groove blocks the gripping operation when the gripping jaws use the sliding gripping plate and the riser to facilitate gripping of parts.
[0023] The vertical plate and the horizontal plate on the grasping claw 9 are connected by a connecting piece 15 . If some parts are damaged, it is convenient to replace them separately later.
[0024] The camera 8 can rotate at any angle of 360°. The design of the camera can facilitate the camera to adjust the angle to take pictures of parts with...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More