

Monocular vision tracking method based on UUV underwater recovery
A monocular vision, underwater recovery technology, applied in image data processing, instruments, calculations, etc., can solve the problem of low tracking accuracy, and achieve the effect of ensuring accuracy and small amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0031] Embodiment 1: A monocular vision tracking method based on UUV underwater recovery in this embodiment is specifically prepared according to the following steps:
[0032] Step 1. When the target light source system appears in the field of view of the UUV (underwater unmanned vehicle) camera during the movement process, the UUV camera collects the sequence images of the target light source system;
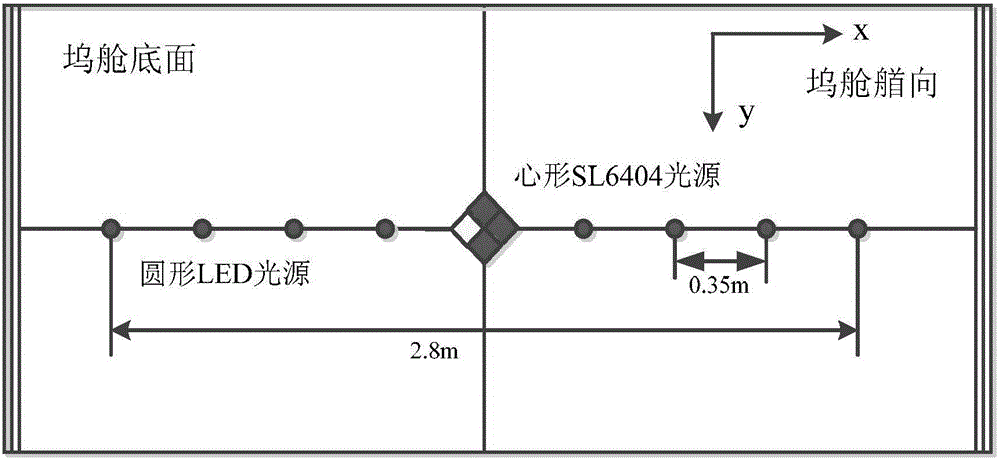
[0033] (Target light source system: Considering the actual situation of the UUV underwater load recovery method, the present invention adopts a linear light source array oriented to the line control position. Make the horizontal, vertical, and heading states reach the posture state. The characteristics of the target light source system are:
[0034] (1) The center points of 9 light sources are arranged on a straight line, and the distance between adjacent light sources is equal and fixed;
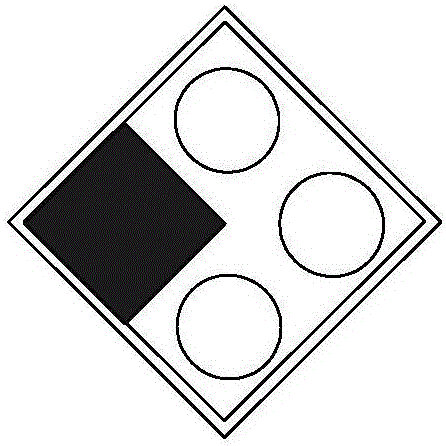
[0035] (2) The light source system is symmetrical to the center, the heart-shaped light...
specific Embodiment approach 2
[0046] Specific embodiment 2: The difference between this embodiment and specific embodiment 1 is: the minimum threshold ε=0.1 of selected iterative convergence in the step 2, the maximum number of iterations N=10, the sequence of the collected target light source system Select the heart-shaped light source target for the first frame of the image (manually use a rectangular frame to select the heart-shaped light source target for the first frame of image, and establish a target weighted model) to establish a target weighted model The specific process is:
[0047] Initialize the heart-shaped light source target with a rectangular box, and use this to mark the target's movement during tracking.
[0048] For the first frame image of the sequence image of the target light source system collected, a heart-shaped light source target is selected with a rectangular frame, and the center coordinates of the rectangular frame are assumed to be (O x ,O y ), where a and b are 1 / 2 of the...
specific Embodiment approach 3
[0071] Embodiment 3: The difference between this embodiment and Embodiment 1 or 2 is that in the step 3, the candidate target model is calculated in the current frame The specific process is:
[0072] The candidate target area refers to the area that may contain the target in each frame. Similar to (1), the candidate target model is expressed as:
[0073] p ^ u ( y ) = C h 1 Σ j = 1 n h k [ | | y - x i * h | | 2 ] δ [ b ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More