

Unmanned aerial vehicle movement speed prediction method based on machine learning
A technology of motion speed and prediction method, which is applied in the direction of navigation through speed/acceleration measurement, navigation calculation tools, etc., and can solve problems such as difficulties and difficult estimation of model parameters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The following will combine Figure 1 to Figure 5 The machine learning-based UAV motion speed prediction method provided by the present invention is described in detail, which is an optional embodiment of the present invention. It can be considered that those skilled in the art can, without changing the spirit and content of the present invention, Modify and polish it.
[0039] First of all, it should be pointed out that the present invention mainly describes the motion speed estimation method in the fixed height mode.
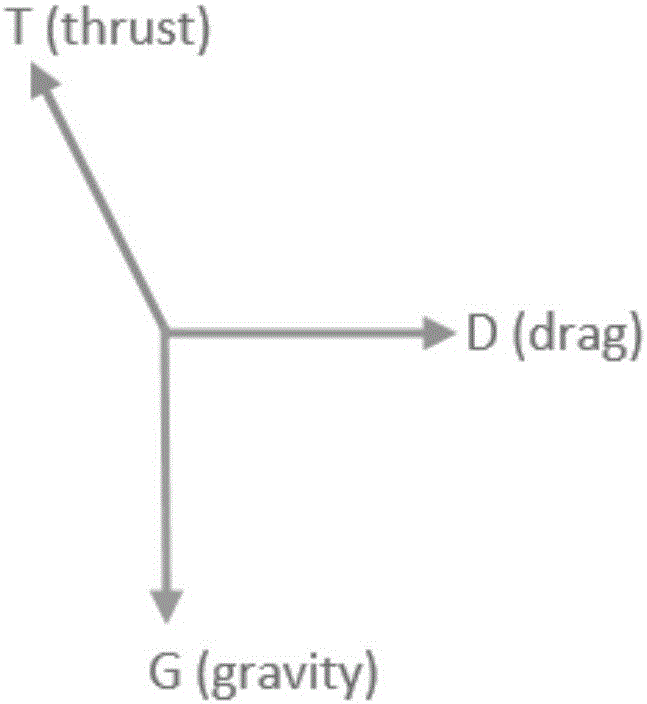
[0040] The fixed height state means that the height of the drone is kept constant and the drone can move freely in the horizontal direction. See the force analysis diagram figure 1 . According to simple derivation, the expression of movement translation speed in fixed height mode can be obtained:
[0041]
[0042] among them Local coordinate system The component of the orthogonal unit vector; D is the induced drag coefficient matrix; R is the local-inertial...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More