

Self-adaption filtering method tracking environmental force sudden change in dynamic positioning
A technology of adaptive filtering and dynamic positioning, applied in the direction of digital adaptive filter, adaptive network, non-electric variable control, etc., can solve the problems of ship position deviation, poor ability to track the sudden change of state value, etc., to reduce the deviation. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
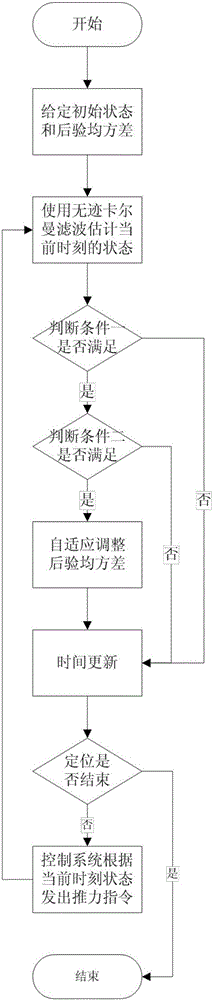
[0034] In this embodiment, an adaptive filtering method for tracking sudden changes in environmental forces is proposed by combining the unscented Kalman filtering algorithm as an example. The process flow of the adaptive filtering method for tracking environmental force mutations combined with unscented Kalman filtering is as follows: figure 1 As shown, the specific implementation steps are as follows:
[0035] S100. Establish the system model of the ship as follows:
[0036] ξ · = A w ξ + E w ω w
[0037] η · = R ( ψ ) v
[0038] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More