

Reference plane determination method and determination system
A technology of reference plane and determination method, applied in image analysis, image enhancement, instruments, etc., can solve problems such as affecting user experience, virtual objects cannot be matched with real scenes in real time, etc., to achieve the effect of wearable portability and freedom
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
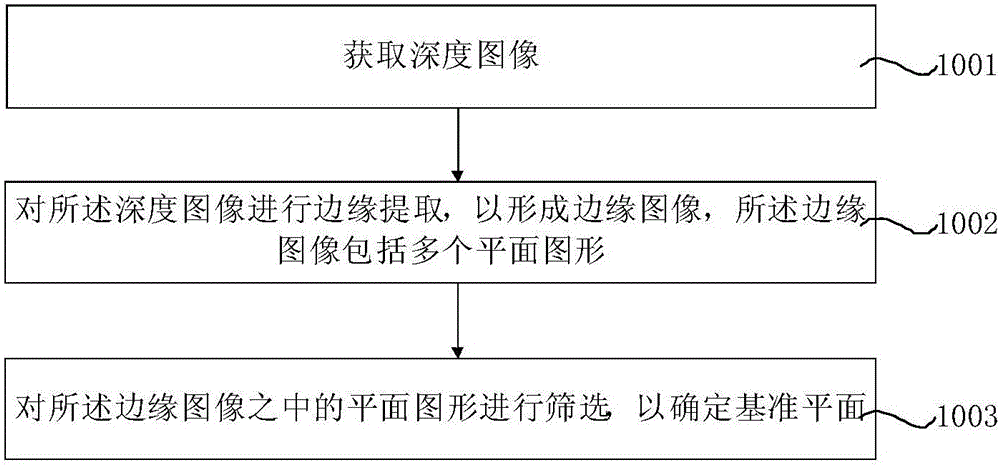
[0073] figure 1 It is a flowchart of a method for determining a reference plane provided by Embodiment 1 of the present invention. Such as figure 1 As shown, the determination method of the reference plane includes:
[0074] Step 1001, acquiring a depth image.
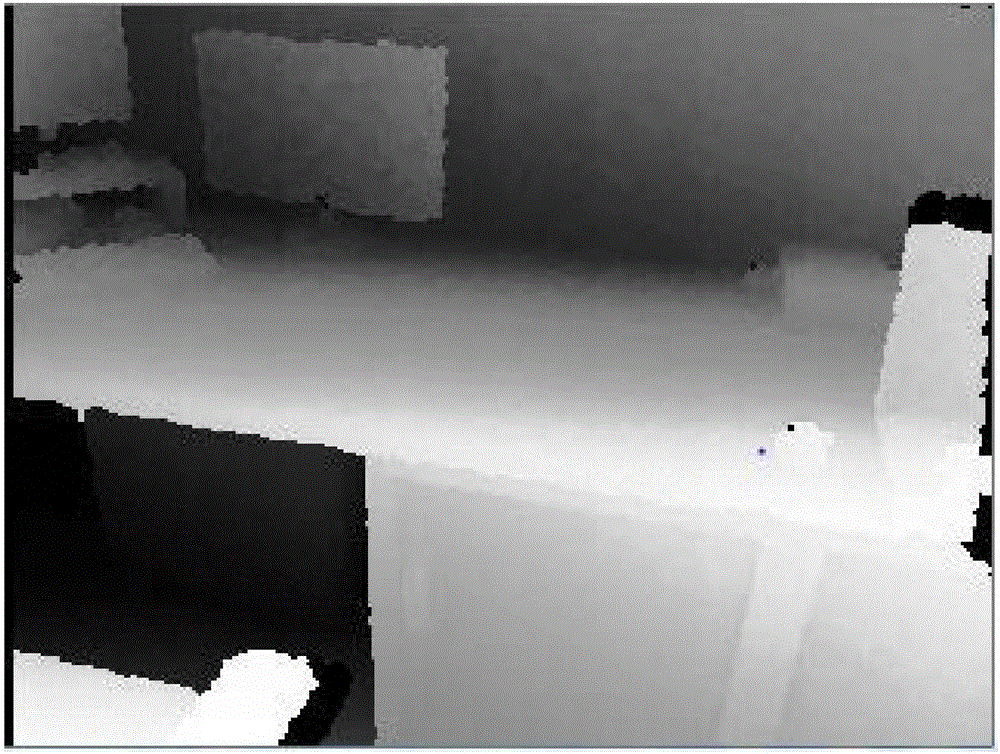
[0075] figure 2 It is the depth image provided by Embodiment 1 of the present invention. Such as figure 2 As shown, in this embodiment, a depth image of an office is acquired through a depth camera. The depth image described in this embodiment is also called a depth image.
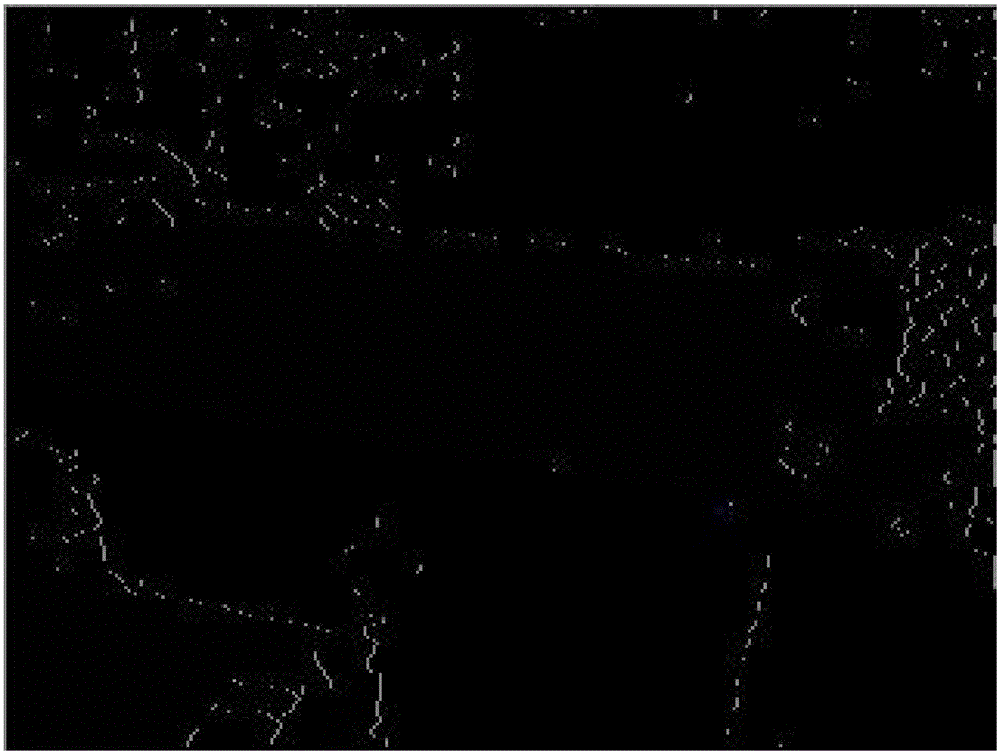
[0076] Step 1002, perform edge extraction on the depth image to form an edge image, and the edge image includes a plurality of plane figures.
[0077] In this embodiment, the step of performing edge extraction on the depth image to form an edge image includes: acquiring the gradient change rate of the depth image according to a preset gradient algorithm; forming a binary image according to the gradient change rate ; Perform edge extractio...
Embodiment 2
[0092] Figure 8 It is a schematic structural diagram of a system for determining a reference plane provided in Embodiment 2 of the present invention. Such as Figure 8 As shown, the system for determining the reference plane includes: a first acquisition unit 101 for acquiring a depth image; a first extraction unit 102 for performing edge extraction on the depth image to form an edge image, and the edge image It includes a plurality of plane figures; the first screening unit 103 is configured to screen the plane figures in the edge image to determine a reference plane.
[0093] see figure 2 , the first acquiring unit 101 acquires a depth image of an office, and the depth image described in this embodiment is also referred to as a depth image. In this embodiment, the first extraction unit 102 includes: a first acquisition module, configured to acquire the gradient change rate of the depth image according to a preset gradient algorithm; a first forming module, configured to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More