

Collaborative robot with area moving capacity and working method of collaborative robot
A technology of mobility and robotics, applied in the directions of manipulators, manufacturing tools, program-controlled manipulators, etc., it can solve the problems of limited movement range of robots and low repositioning accuracy of regional mobile trolleys, and achieve the effect of improving accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
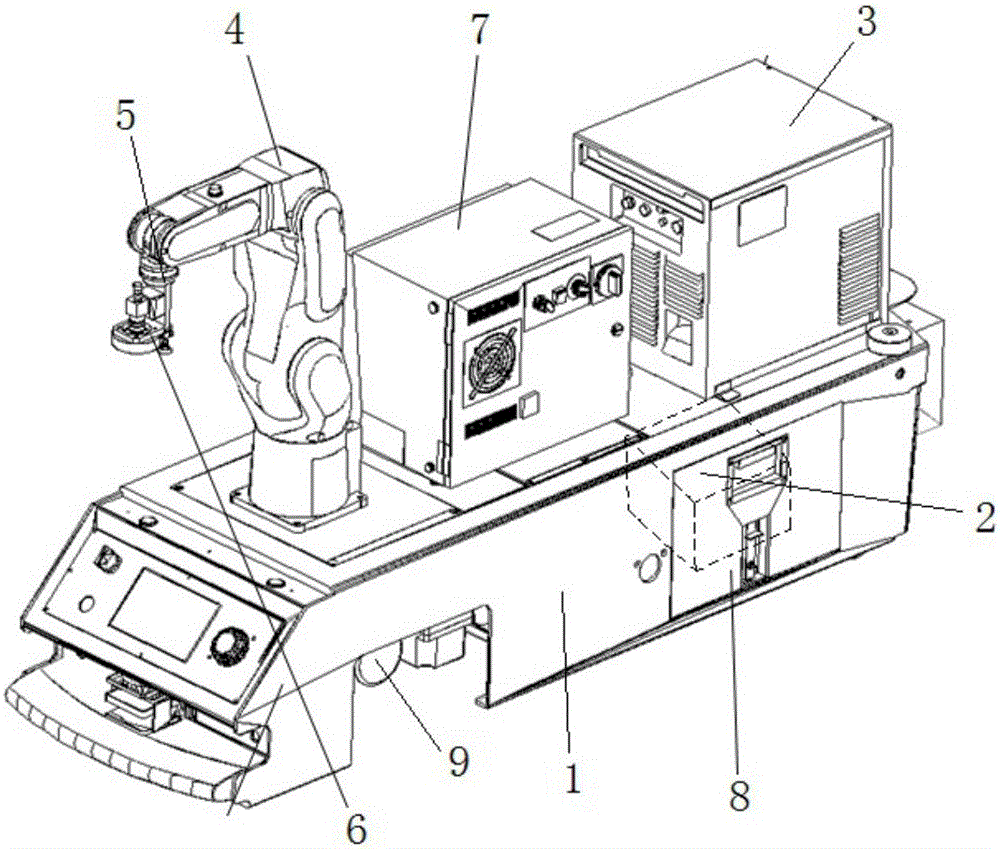
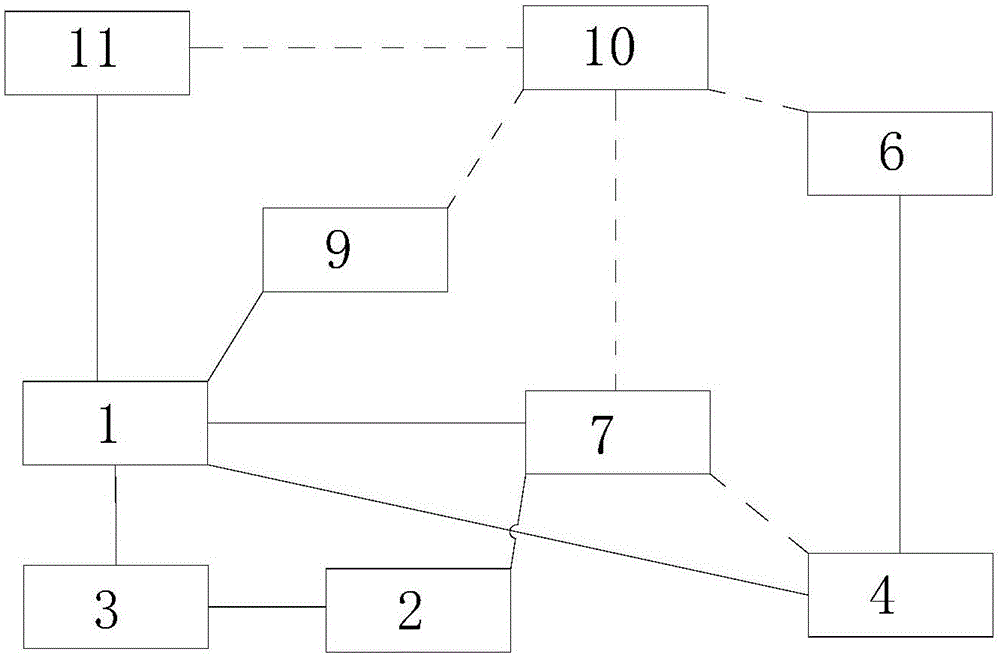
[0025] See figure 1 and figure 2 As shown, a collaborative robot with regional mobility capability of a preferred embodiment is shown, including:
[0026] The regional mobile trolley 1, the regional mobile trolley 1 is equipped with a battery 2 and a power inverter 3 for power inverter, and the battery 2 is connected to the power inverter 3;
[0027] The robot control cabinet 7, the robot control cabinet 7 is installed on the top of the regional mobile car 1, and is located in front of the power inverter 3, the robot control cabinet 7 is connected with the power inverter 3, and the power inverter 3 converts the DC power output from the battery 2 Inverted into AC power and transmitted to the robot control cabinet 7.
[0028] Also includes a robot arm 4, the robot arm 4 is installed on the platform at the top of the area mobile car 1, and an industrial camera 6 is installed on the claw 5 of the robot arm 4, and the industrial camera 6 is used to take pictures of objects to be...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More