

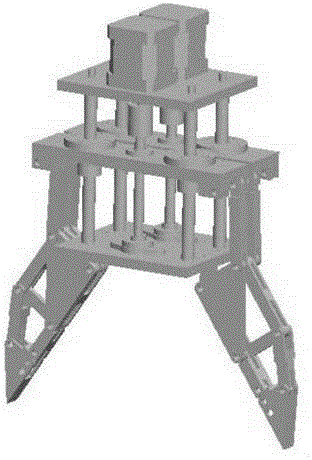
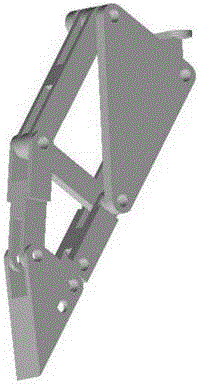
Dual-motor drive cooperatively-controlled under-actuated manipulator
A dual-motor-driven, collaborative control technology, applied in the direction of program-controlled manipulators, manipulators, manufacturing tools, etc., can solve problems such as the impact of grasped complex objects, inability to adapt to shape, size inconsistency, etc., to achieve a large envelope grasping range, Accurate and reliable grasping, achieving the effect of path planning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] Below is working principle and working process of the present invention:
[0039] The working principle and action process of the present invention: After optimizing the calculation for the specific object to be grasped, the grasping posture corresponding to the required grasping force can be calculated, and the grasping posture is controlled by two stepping motors. Specifically: ① When grasping complex objects of the same type (such as apples) with inconsistent shapes and sizes, it is possible to achieve freedom adaptability, non-destructive and reliable grasping of such objects by selecting appropriate elastic elements and structural dimensions. Kinds of complex objects. ② When grabbing complex objects of the same shape (such as apples, oranges, tangerines, etc. spherical, large and small square boxes, etc.) and complex objects of the same shape with large changes in shape and size, it is possible to realize both freedom and flexibility by selecting appropriate elasti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More