

Method for planning routes of multi-unmanned aerial vehicles based on particle swarm optimization algorithm
A particle swarm optimization and route planning technology, which is applied in navigation computing tools and other directions, can solve the problems of conflict of multi-UAV information observation, insufficient consideration of redundancy in correlation, and lack of effective and practical weight allocation methods.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
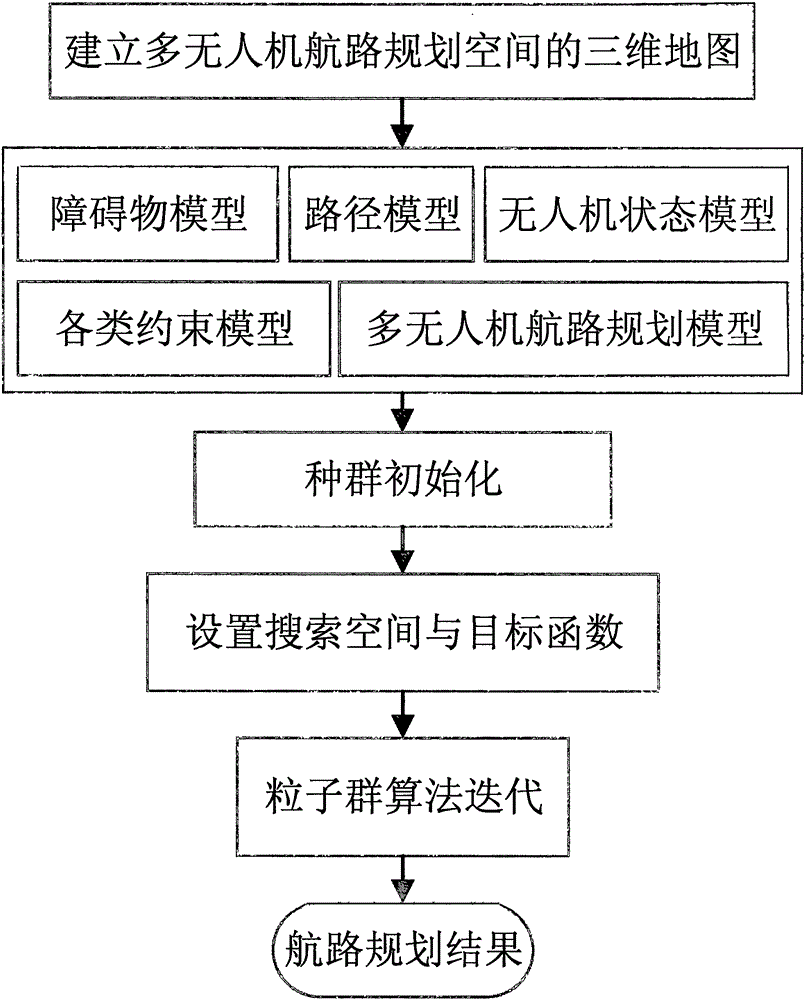
[0045] In order to enable those skilled in the art to better understand the scheme of the application, the following will be combined with the appended figure 1 , to describe the technical implementation solution in this application.
[0046] Step 1: Establish a 3D map of the multi-UAV route planning space. Store the UAV flight space in the form of data, and express it as a set of all points (x, y, z) in the planning space {(x, y, z)|X min ≤x≤X max , Y min ≤y≤Y max ,Z min ≤z≤Z max}, where (x, y) represents the horizontal position of the point, and z is the elevation data. The discretized planning space adopts the form of raster to save the digital terrain elevation data.
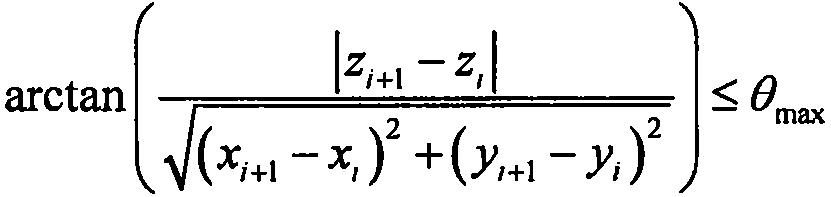
[0047]Step 2: Establish a multi-UAV route planning model under the three-dimensional map. It mainly includes obstacle model, path model, UAV state model, constraint model and multi-UAV route planning mathematical model. The constraint model includes the maximum turning angle constraint in the vertic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More