

Unmanned plane-based chemical spraying method, unmanned plane and unmanned plane system
A drone and polygon technology, applied in the field of drones, can solve the problems of slow setting speed, long operation time, and large number of waypoints, and achieve optimal waypoint setting strategy, uniform pesticide spraying, and small number of waypoints. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other. The present invention will be further described in detail below in conjunction with the drawings and specific embodiments.
[0035] In addition, in the present invention, the descriptions involving "first", "second" and so on are only for the purpose of description, and should not be understood as indicating or implying their relative importance or implicitly indicating the quantity of the indicated technical features. Thus, the features defined as "first" and "second" may explicitly or implicitly include at least one of these features.
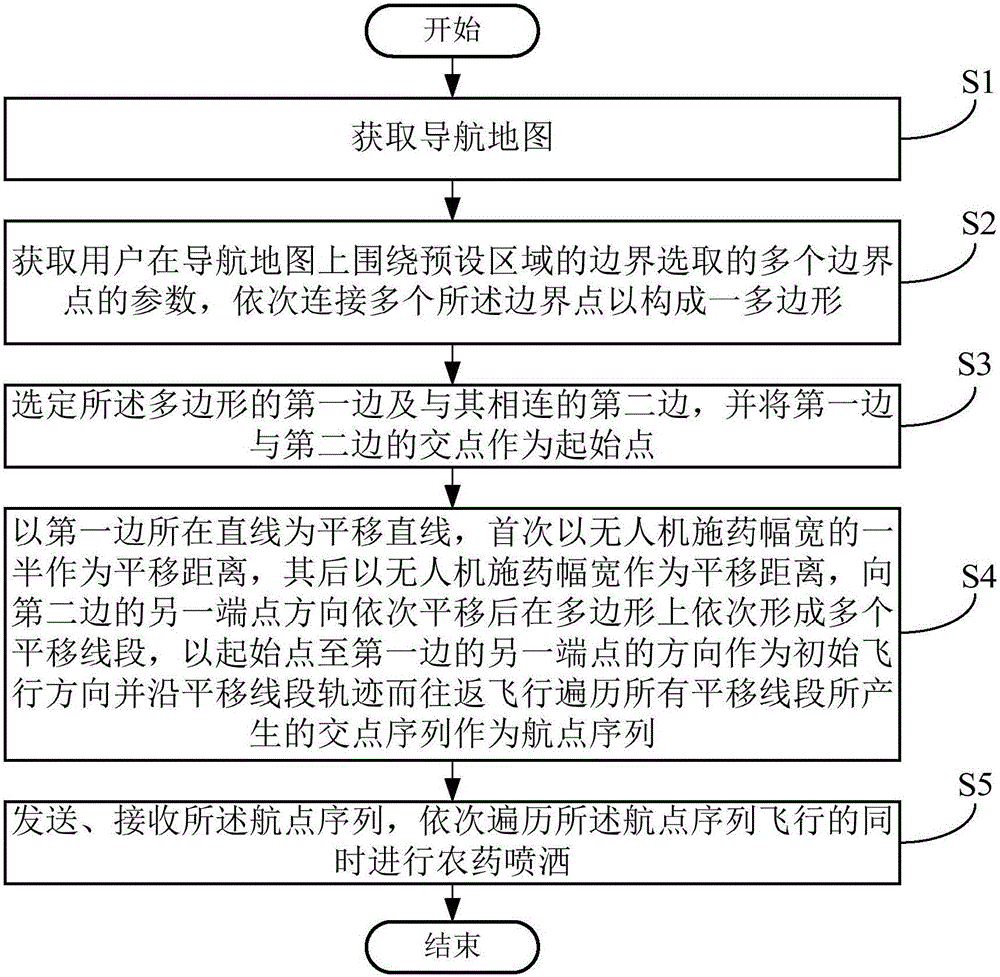
[0036] Please refer to Figure 1 to Figure 3 , the drone-based spraying method of the embodiment of the present invention includes the following steps.
[0037] Navigation map obtaining step S1: obtaining a navigation map.
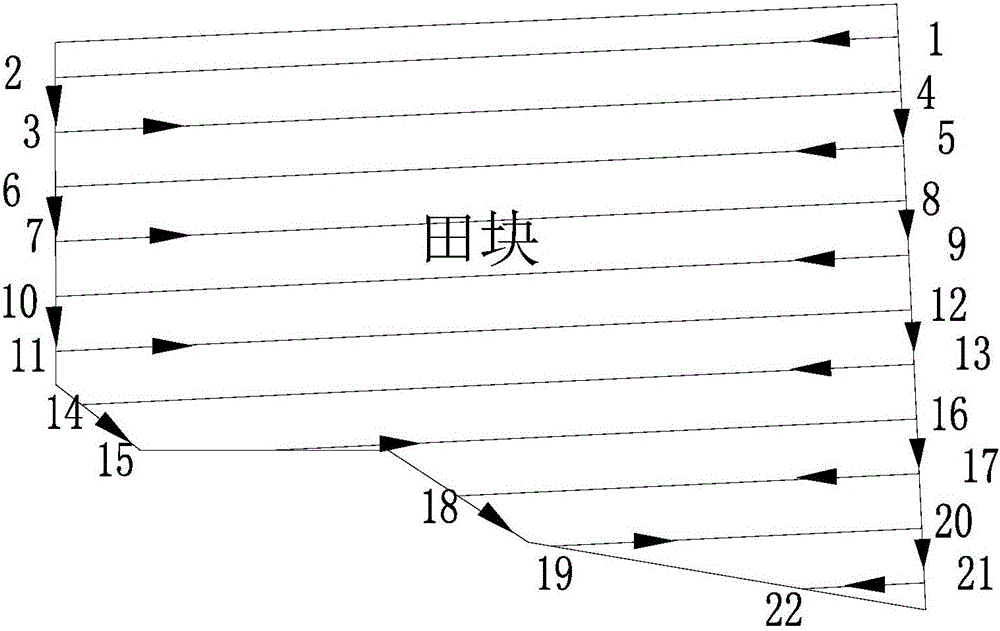
[0038] Polygon construction step S2: Obtain a p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More