

Movement control method for six-shaft industrial robot of specific structure
A technology of industrial robots and motion control, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of complex calculation process, inability to calculate inverse solutions, and inability to eliminate elements.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
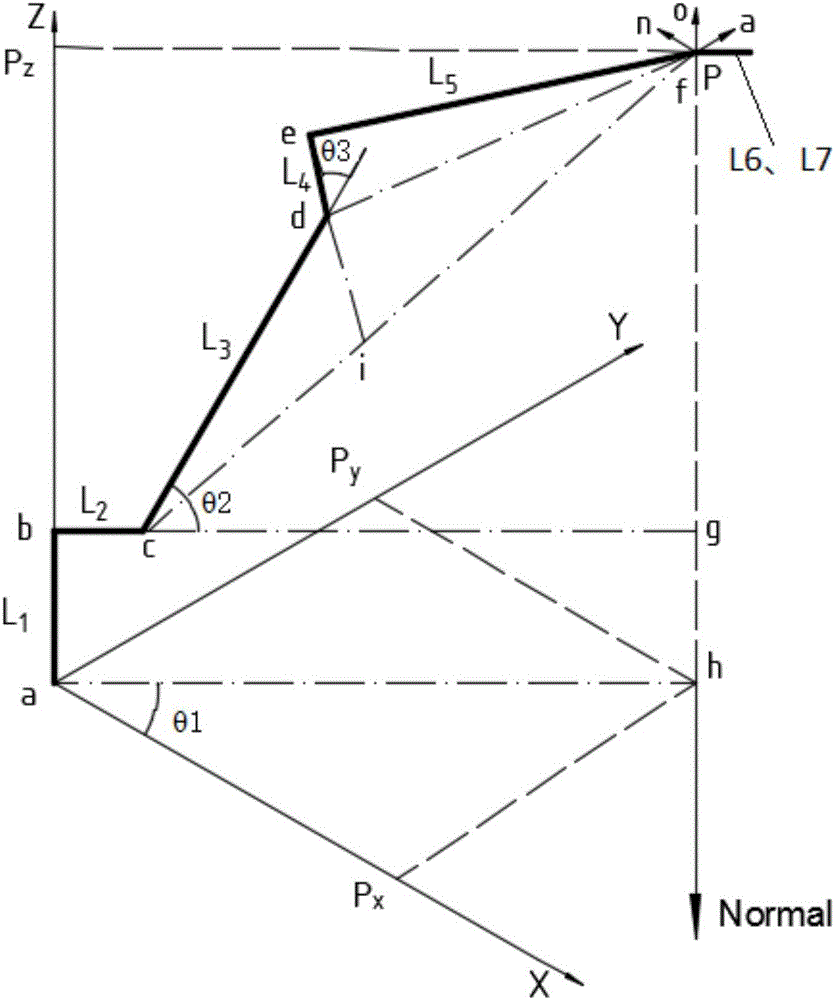
[0054] The invention provides a motion control method for a six-axis industrial robot with a specific configuration, comprising the following steps:
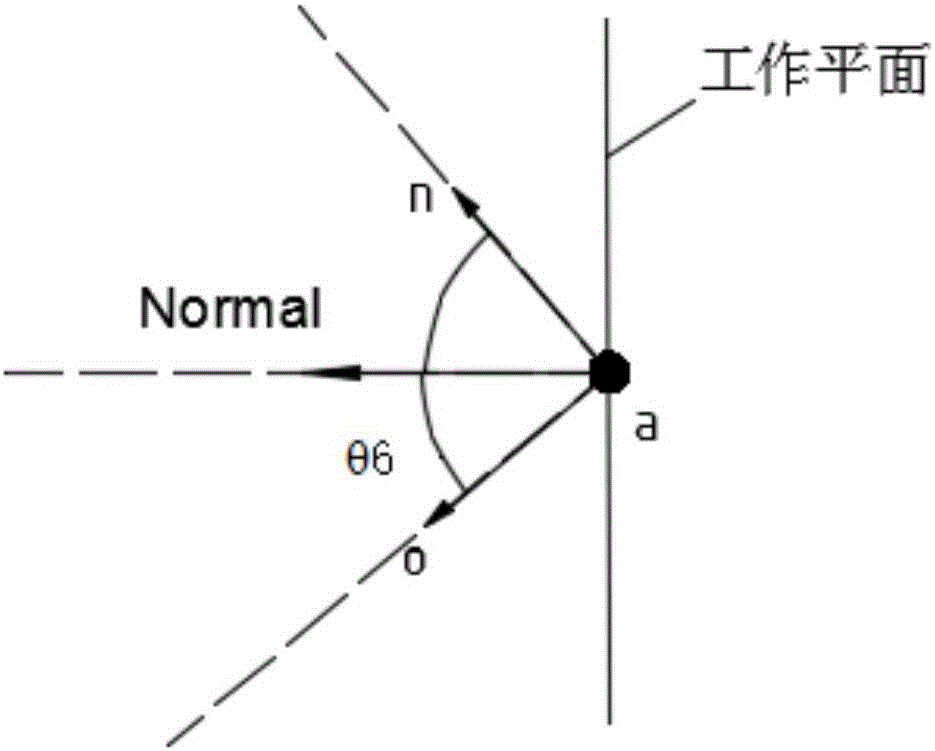
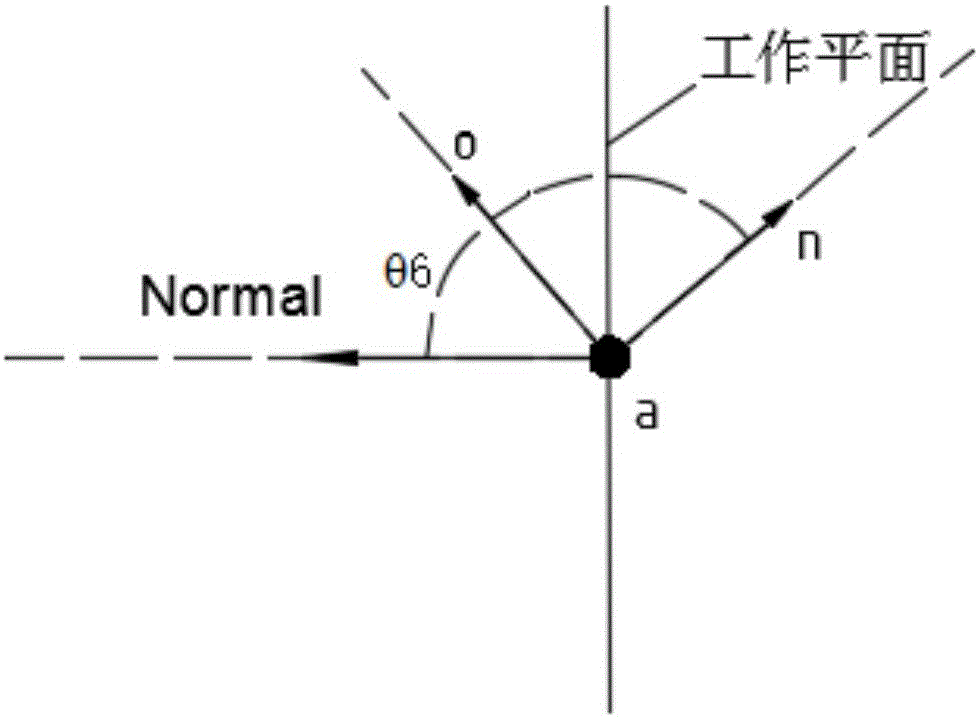
[0055] S1. Establish the connecting rod coordinate system of the industrial robot, and obtain the geometric relationship between the seven rods and the six axes of the industrial robot;
[0056] S2. After obtaining the G command file corresponding to the industrial robot, read the target motion position of the industrial robot;
[0057] S3. According to the target motion position and the geometric relationship of the industrial robot, sequentially calculate the joint angles of the six axes of the industrial robot;
[0058] S4. After converting the calculated six joint angles into the number of motion pulses corresponding to each axis, send them to the driver of the industrial robot;
[0059] S5. The driver sequentially drives the corresponding motors to drive the corresponding axes to move according to the number of motion puls...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More