

Stair climbing robot with planetary gear train
A planetary gear train, robot technology, applied in the direction of motor vehicles, transportation and packaging, can solve the problems of slow movement, low transmission efficiency, difficult deformation, etc., to achieve the effect of reducing requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
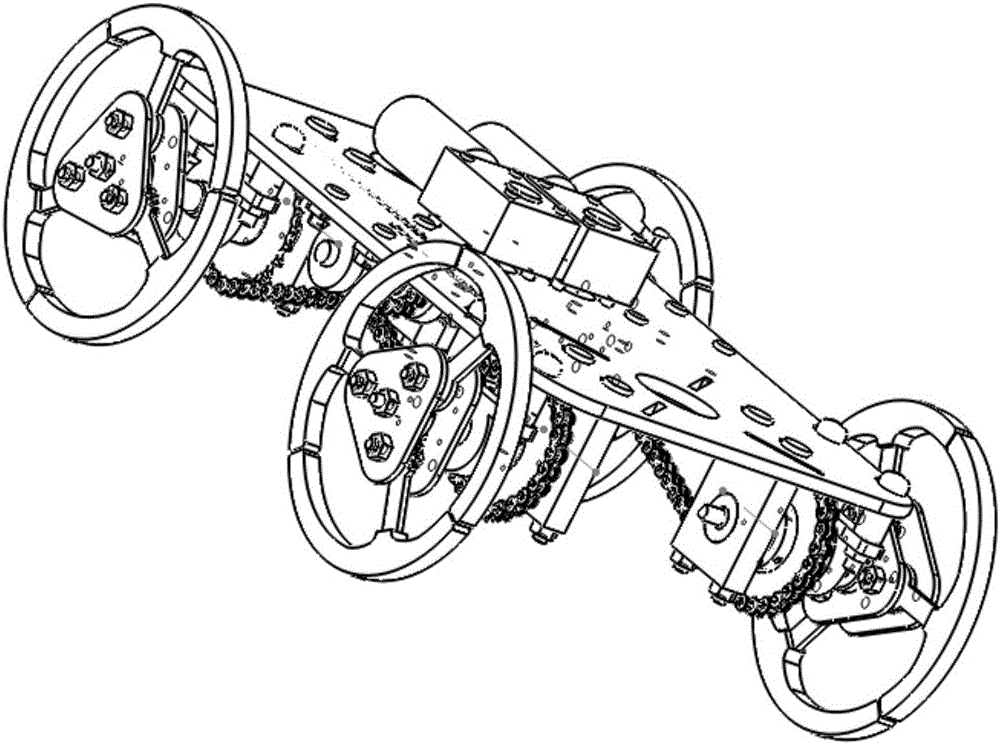
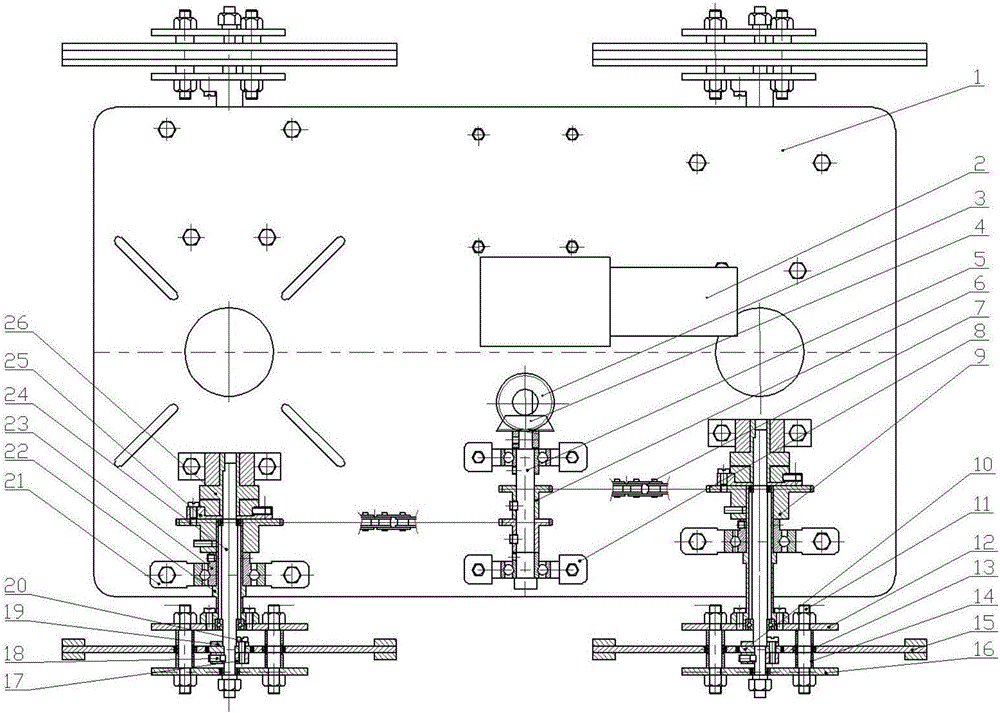
[0027] A planetary gear train climbing robot, such as Figure 1-Figure 14 As shown, it includes a base plate 1, a transmission system, a conversion system, and an execution system. The transmission system includes two transmission groups on the left and right. These two transmission groups are parallel and symmetrically installed on the longitudinal centerline. 2. The intermediate shaft 5, the driving bevel gear 3, the driven bevel gear 4, two small sprockets 6, two large sprockets 9 and two chains 7. The DC gear motor 2 is installed on the bottom plate 1, and its output shaft Through a round hole on the bottom plate 1, it is fixedly connected with the driving bevel gear 3 with a top screw, and the driven bevel gear 4 is installed on the intermediate shaft 5 perpendicular to the output shaft of the DC gear motor 2 and meshed with the driving bevel gear 3 , the intermediate shaft 5 is installed on the transverse centerline of the bottom plate 1 through two bearing housings 8, t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More