Optimal Design Method for Self-calibration Test of Inertial Navigation Platform System Based on Genetic Algorithm
A genetic algorithm and optimization design technology, applied in the field of inertial navigation platform system self-calibration test optimization design, can solve problems such as high dependence and long time consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
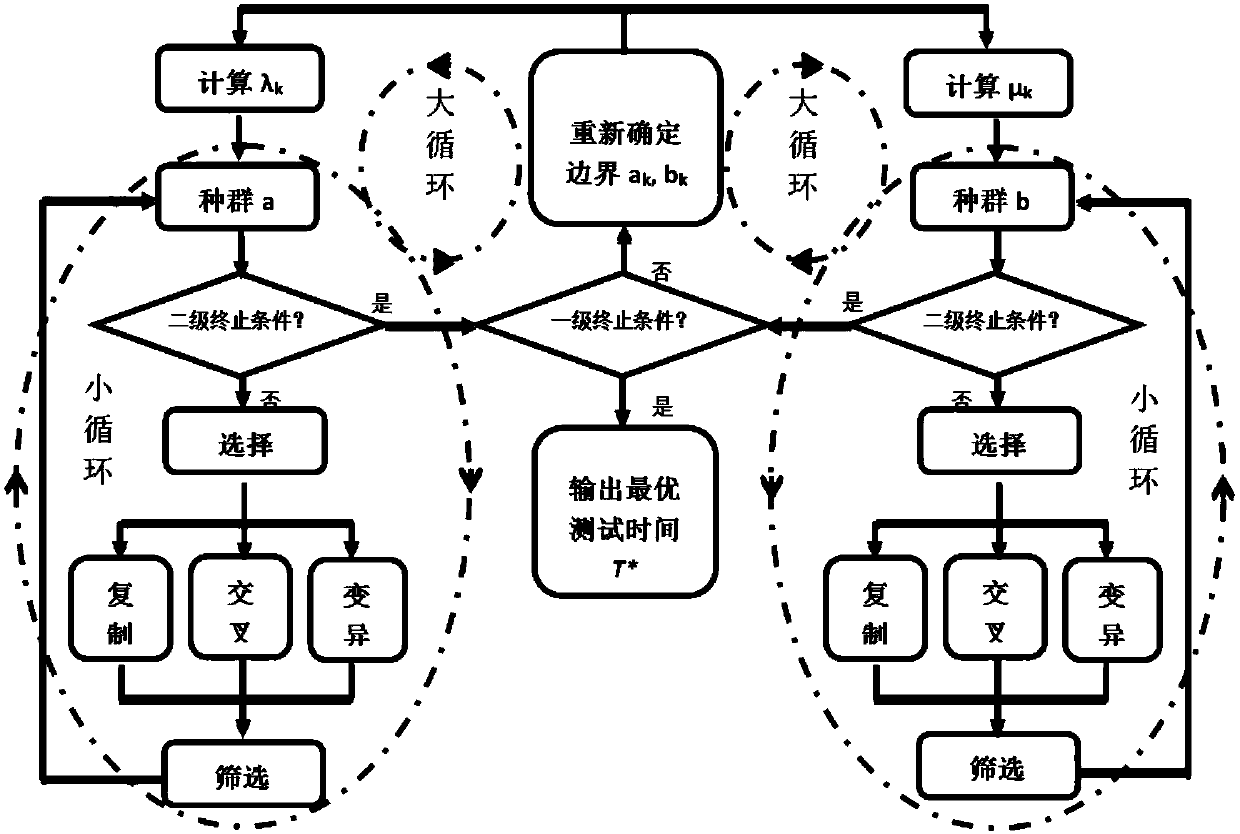
[0075] A self-calibration test optimization design method for inertial navigation platform system based on genetic algorithm, the flow of the whole multi-level optimization algorithm is as follows: figure 1 As shown, it includes a large cycle and a small cycle, wherein each large cycle must execute several small cycles, and the number of small cycles is related to the algebra of population reproduction. The optimal design method includes test time optimization and information matrix determinant value optimization, respectively using Fibonacci method and genetic algorithm to solve the problem. The specific steps are as follows:
[0076] Step 1: Solve the misalignment angle equation of the calculation system relative to the station system
[0077]
[0078] In the formula ψ—the attitude alignment error of each axis of the platform system and each axis of the calculation system, ψ=[ψ x ψ y ψ z ] Τ , are small angles;
[0079] ω——the inertial angular velocity of the table...
Embodiment 2
[0144] The first-level optimization algorithm is as follows:
[0145] (1) First-level optimization algorithm process based on Fibonacci method
[0146] Step 1. Determine the initial interval [a 1 = l T ,b 1 = u T ], and give the final interval δ, which is the precision of the optimal value T*;
[0147] Step 2. Calculate the initial observation value λ 1 ,μ 1 ,
[0148]
[0149] find function value And set k=1;
[0150] Step 3. Compare function values, if Then go to step 4, otherwise go to step 5;
[0151] Step 4. If b k -λ k ≤δ, stop the iteration and output T*=μ k ; otherwise order
[0152] a k+1 =λ k ,b k+1 =b k , go to step 6;
[0153] Step 5. If μ k -a k ≤δ, then stop the iteration and output T*=λ k ; otherwise order
[0154] a k+1 =a k ,b k+1 =μ k , go to step 6;
[0155] Step 6. Go to step 3.
[0156] where the Fibonacci sequence {F k} is defined as F 0 =F 1 =1,F k+1 =F k +F k-1 ,k=1,2,…, and need to satisfy F n ≥(b 1 -a 1 ) / δ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com