

Charging method for mobile robot in wireless charging sensor network system
A mobile robot and sensor network technology, applied in the charging field of mobile robots, can solve problems such as sensor node death, achieve the effect of balancing network energy consumption and improving utilization efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be further described below in conjunction with the accompanying drawings. The following examples are only used to illustrate the technical solution of the present invention more clearly, but not to limit the protection scope of the present invention.
[0041] A charging method for a mobile robot in a wireless charging sensor network system, comprising the steps of:
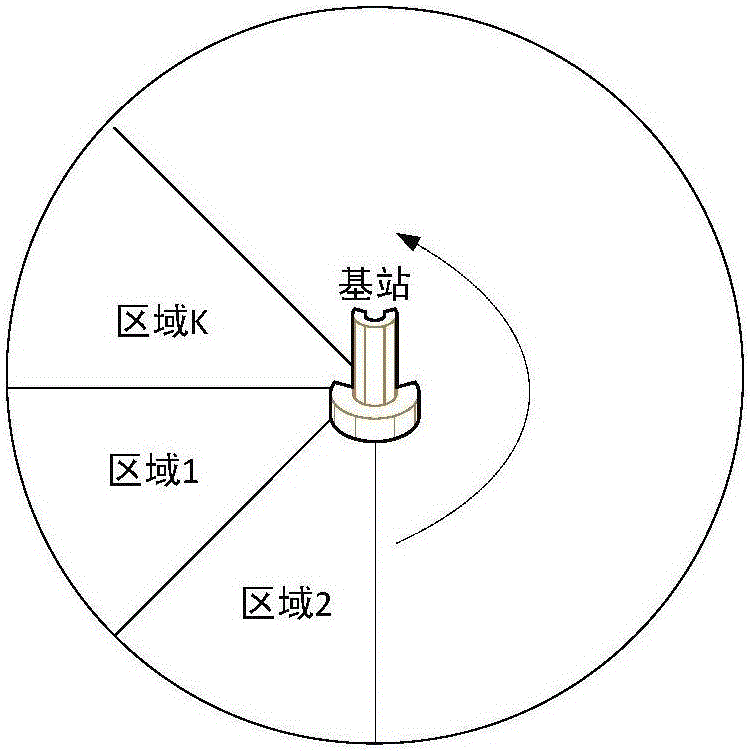
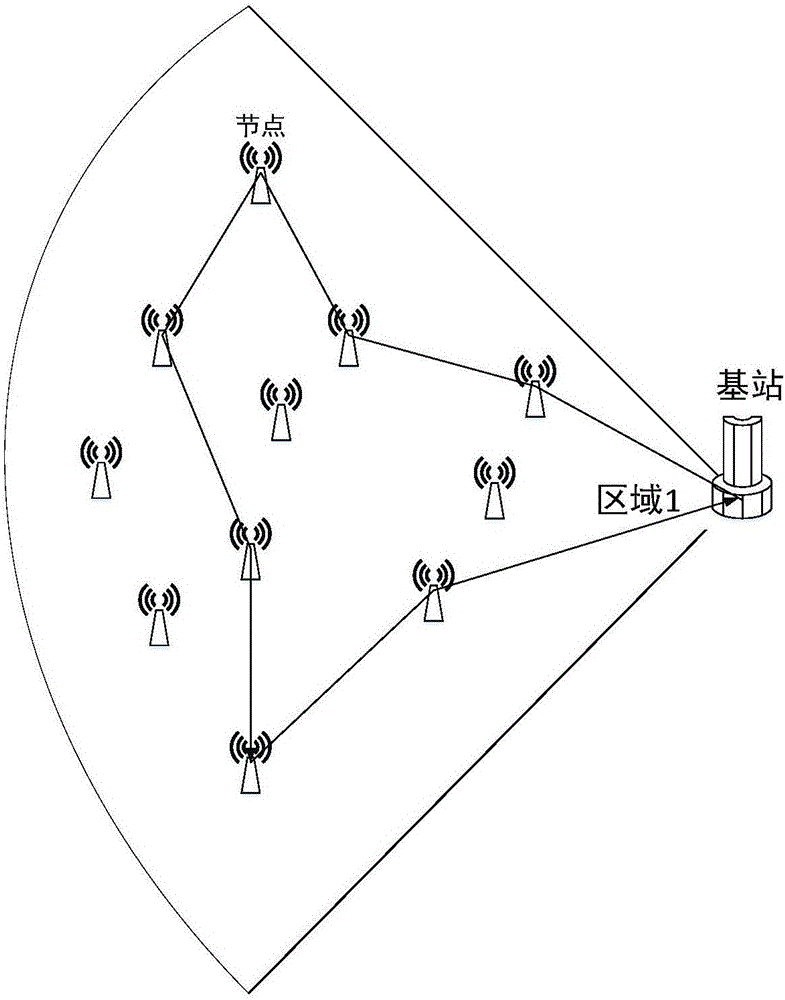
[0042] (1) First construct a wireless sensor network system, which includes base stations with multiple charging points, sensor nodes with wireless power receiving devices, and mobile robots with wireless charging functions.
[0043] In addition to processing the environment collected by sensor nodes, the base station has access to Group mobile robot charging points, and adopt the largest number of mobile robot configurations. This configuration makes even if a mobile robot cannot be in a dormant state due to failure, there will be a spare mobile robot instead of work, which enh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More